Introduction to FlexRay
Electronic Assistance Systems
Completion requirements
People have long become accustomed to the fact that the requirements established for an automobile’s fuel consumption, convenience and safety can only be satisfied by electronic functions. There is the electronic access system, for example, which automatically detects the electronic key and lets the driver conveniently unlock and start the car without having to manually operate the key. Or there is cruise control, which maintains constant driving speeds starting at 30 km/h, offering greater convenience on long trips.
But there are also hidden functions that can be cited, such as electronic damper control, which reduces wheel load fluctuations and assures good contact between the road and the tires. This produces optimal vibration behavior of the car body, independent of road condition and for any car loading situation.
While people initially had a hard time accepting electronic functions that would increase driving safety, today they are being greeted with great acceptance. This is primarily because active safety systems such as ABS and ESP have made significant contributions toward reducing the number of accidents despite considerable growth in numbers of motor vehicles and car trips. With the goal of making car driving even safer, the automotive industry is especially promoting advanced and new development of innovative active safety and driver assistance functions.
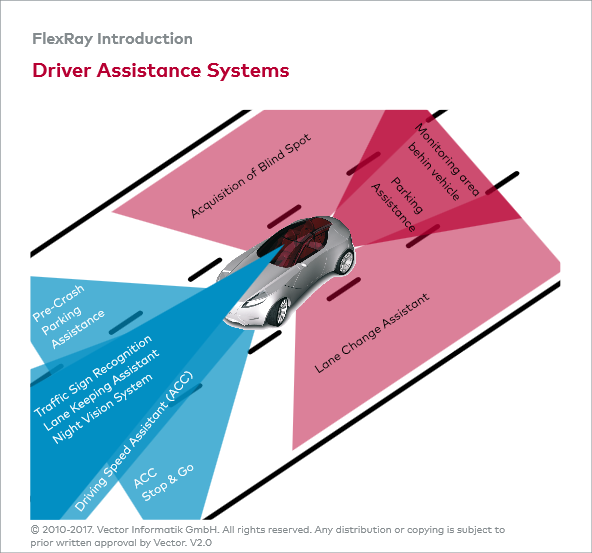
One example of a future system is an electronic assistant that automatically adapts the vehicle’s speed to the traffic flow. Another electronic assistant continually observes adjacent lanes with a range of up to 50 m and warns the driver during passing and lane changing maneuvers, if a vehicle has been detected in the neighboring lane. Another electronic assistant, for example, facilitates safe parking.
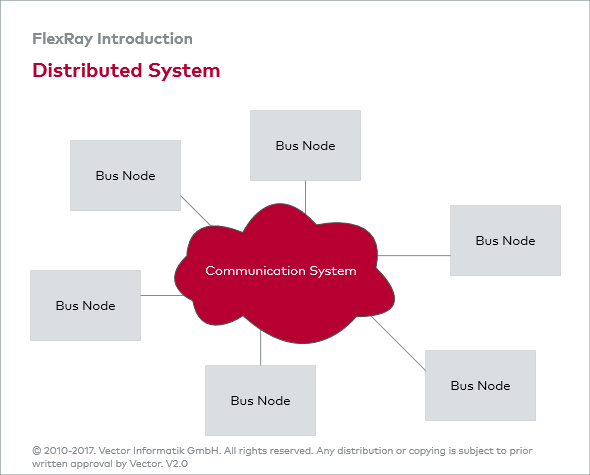
In the background, behind of all these systems, the control applications cannot be contained within one ECU any longer and instead require multiple ECUs working with the help of a communication system. It is no longer autonomous ECUs, rather distributed systems that are increasingly forming the backbone of modern safety and driver assistance systems.
Simply incorporating a communication system is not enough; strictly specified time-based cause-and-effect chains also need to be assured. The focus has turned to communication systems that ideally offer deterministic data communication which is independent of bus load, i.e. they guarantee equidistant signal transmission. One speaks of a real-time communication systems with a time-triggered approach.
Last modified: Friday, 27 April 2018, 8:33 AM