Synchronization Principle
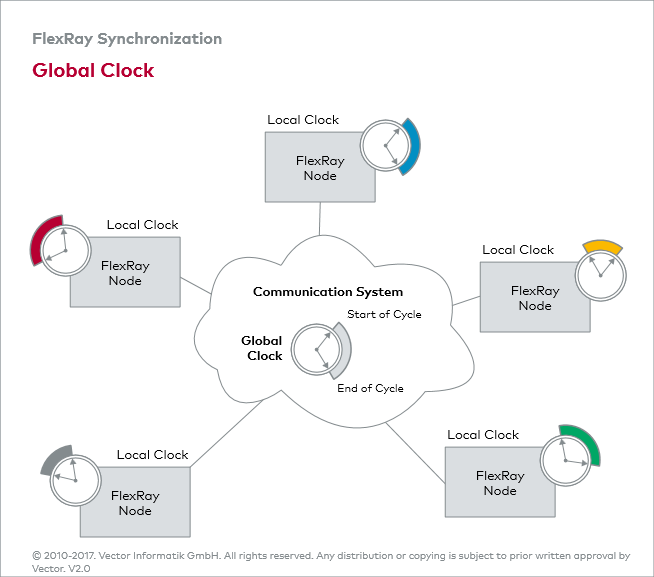
Smooth flow of data communication in a FlexRay cluster assumes that all FlexRay nodes share a time consensus, because all activities of the communication system are triggered when certain points are reached in the time sequence.
In a FlexRay cluster, it must be assured that — from the perspective of all FlexRay nodes — all communication cycles always begin at the same point and are of equal length. It must also be guaranteed that all static slots of the FlexRay nodes always begin at the same point within the cycle.
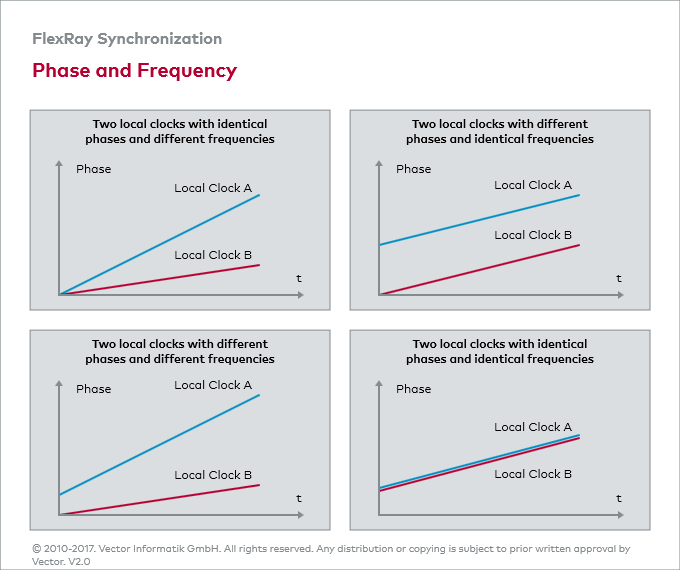
A prerequisite for this is a global time consensus. Because a FlexRay cluster is based on a multi-master architecture, such a global time consensus can only be produced cooperatively based on the local time bases. This represents a great challenge, because frequency tolerances and tolerances of the passive components in the crystal oscillator circuits produce different frequencies and phases at identical nominal frequencies.
In addition, changing environmental conditions and aging (over an operating period of ten years, tolerances of about 250 ppm must be assumed for crystal oscillators) result in frequency deviations. Usually, one assumes a frequency deviation of up to 1500 ppm over the entire life of a vehicle.
Obviously, it would be impossible to establish a network-wide time base without regular adjustment of the local time bases. The FlexRay nodes utilize a special algorithm to correct their local clocks so that all local clocks in the FlexRay cluster run synchronous to a global clock up to a defined deviation. Two methods are applied here: Phase or offset correction and frequency or rate correction.