Introduction to FlexRay
Brake-by-wire
Completion requirements
Electronification of the automobile does not shy away from domains in which mechanical and hydraulic systems traditionally dominated either. To implement driver assistance functions with even greater benefits, electronic interfaces to the chassis are needed, primarily to the braking and steering systems.
Examples of such electronic interfaces are the electro-hydraulic and electro-mechanical brake — EMB. While the brake calipers on electro-hydraulic brakes are still hydraulically actuated, on electro-mechanical brakes braking forces right at the wheels are generated by electric motors. These are controlled by an electronic control unit that gets its input from an electronic brake pedal with pedal feel simulator (force feedback). The related control and sensor signals are transmitted via communication lines.
Not only does such a brake-by-wire system enable separate braking actions at the individual wheels, which considerably improves braking stability. It also makes it possible to adapt the pedal characteristic and braking effect to the individual driver simply by modifying the software. Finally, the local electronics improves diagnostic capability, which leads to increased operating safety. The ability of a brake-by-wire system to incorporate the brake in the dynamic control of a vehicle also offers great potential in the effort to increase active safety. As multifaceted as the potential of brake-by-wire systems is, such systems still represent a great safety risk. Just one fault or failure of individual system components can have serious consequences. Therefore, brake-by-wire systems must be designed to be fault tolerant. That is the only way to guarantee the legally prescribed basic braking functionality if any errors occur.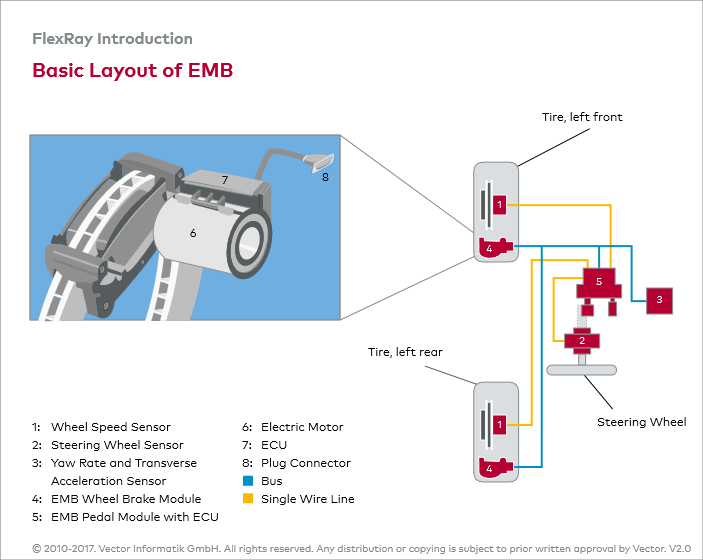
Last modified: Friday, 27 April 2018, 8:34 AM