기능 소프트웨어
AUTOSAR는 소프트웨어 컴포넌트를 통해 ECU의 기능 소프트웨어를 구현합니다. 핵심 원리는 SWC의 형식적 디스크립션(SWC 디스크립션)을 생성하는 것이며, 여기에서 SWC의 C 인터페이스가 도출되며, SWC 디스크립션은 AUTOSAR에서 정의한 스킴을 통한 XML 파일로 저장됩니다.
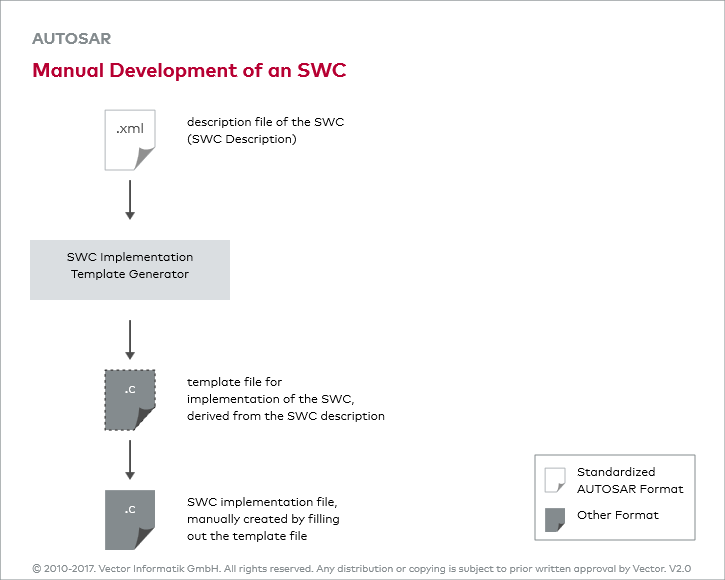
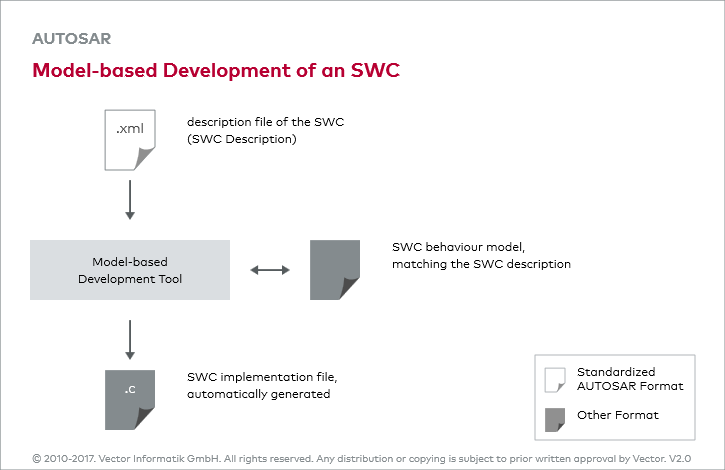
SWC 디스크립션을 통한 SWC 구현은 다음 선택사항 중 한 가지를 이용할 수 있습니다.
- 수동 개발
전통적으로 SWC는 수동 C 코딩으로 구현됐습니다. - 모델 기반 개발
구현을 위해 SWC의 동작 모델을 만듭니다. C 코드는 이 모델에 기반하여 자동으로 생성됩니다.
AUTOSAR의 개념 상 SWC는 마이크로컨트롤러에 독립적인 인터페이스만 갖도록 구현하는 특징이 있습니다. 이는 서로 다른 하드웨어 플랫폼에서 SWC를 실행하는 데에 필요한 기술적 조건을 제공하며, 이는 다른 ECU에서 SWC를 더욱 효율적으로 재사용할 수 있게끔 합니다. 물론 다른 제약 조건으로 인해 주어진 ECU에서 선택된 SWC를 실행하기가 불가능할 수 있습니다. 예를 들어, 도어 ECU에서 엔진 컨트롤러 기능을 이용하는 것은 적합하지 않을 수 있는데, 이는 제공된 인터페이스가 그것을 허용하는 상황에서도 마찬가지로 어렵습니다.
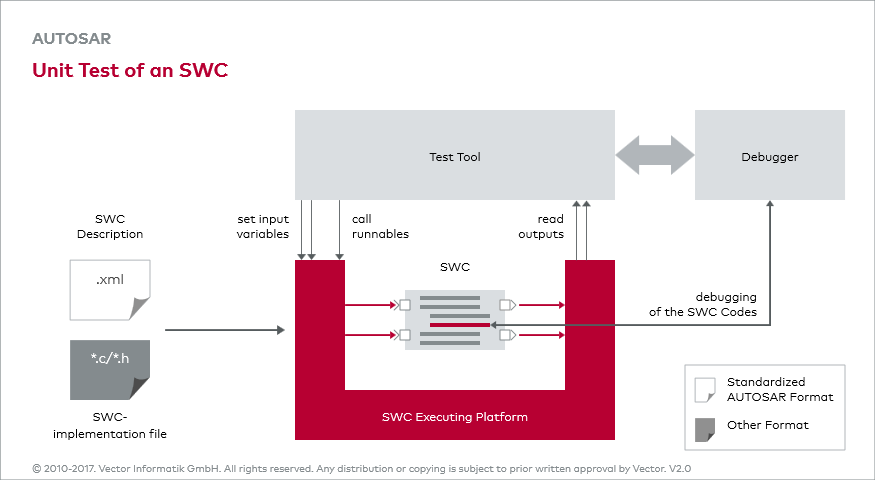
실제 개발 절차에서 이를 재사용하려면 인터페이스 호환성뿐만 아니라 SWC 기능성을 보장하는 것 역시 필요합니다. SWC의 명시적 정의 인터페이스 덕분에 단위 테스트와 같은 테스트 개념을 SWC에 적용할 수 있습니다. 이를 통해 다른 SWC와는 독립적으로 하나의 SWC를 개발할 수 있으며, 이를 테스트가 완료된 단위로서 라이브러리에 제공할 수 있습니다. 이는 하나의 SWC를 COTS 컴포넌트로 만드는 데까지 적용될 수 있습니다.