Functional Software
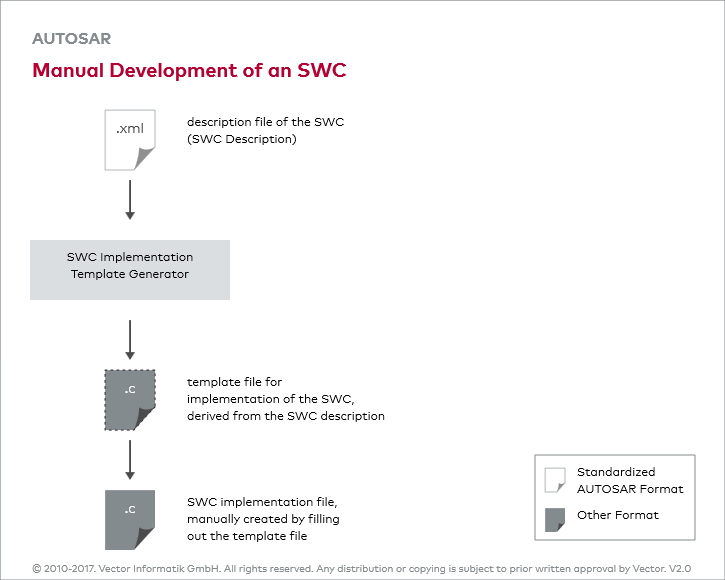
The functional software of an ECU is implemented in AUTOSAR via software components. The core principle is the creation of formal descriptions of the SWC (SWC Description), from which the C-interfaces of the SWC are then derived. The SWC Description is stored in an XML file in an AUTOSAR-defined scheme.
An SWC implementation matching the SWC description is created using one of the following options:
- Manual development
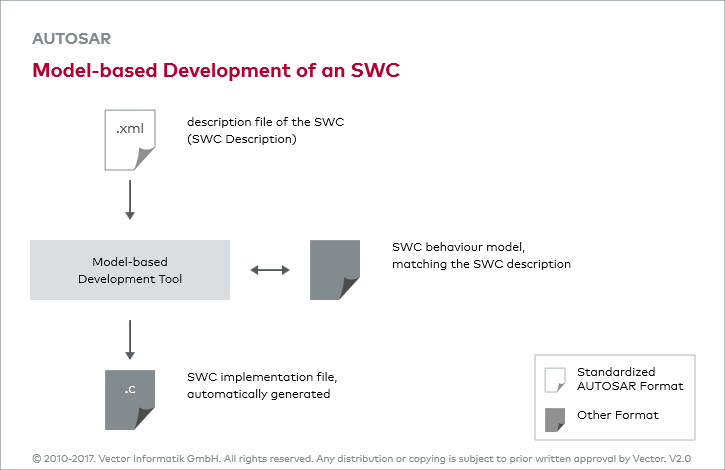
The SWC is implemented traditionally by manual C coding. - Model-based development
A behavior model of the SWC is created for the implementation. The C code is automatically generated based on this model.
The AUTOSAR concept of the SWC is characterized by the SWC implementation having only microcontroller independent interfaces. This provides the technical conditions needed for operating the SWCs on different hardware platforms and thereby for better reuse of the SWC in different ECUs. Of course, due to other constraints it may not be possible to run an arbitrary SWC on any given ECU. For example, it may not be reasonable to have an engine controller function run on a door ECU, even if the interfaces provided allowed for it.
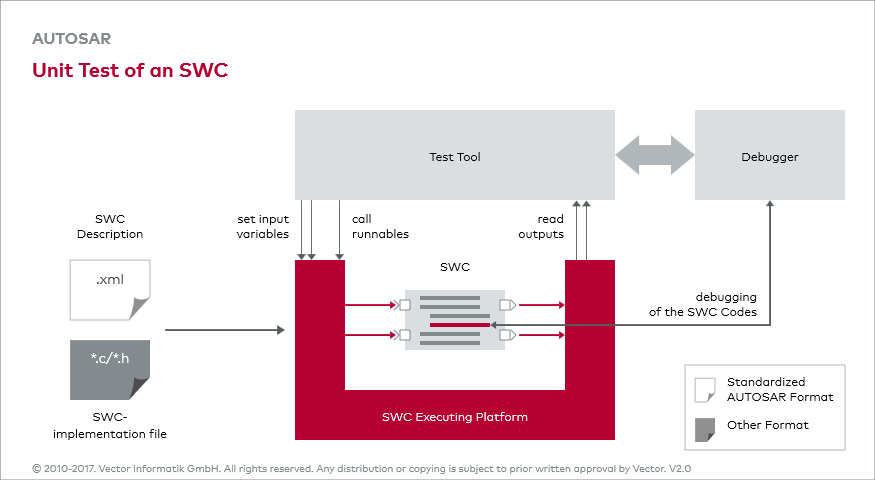
To enable reuse in real development processes, along with interface compatibility the assurance of SWC functionality is also relevant. Thanks to explicitly defined interfaces of SWCs, test concepts such as Unit Test can now also be executed on the SWC. This makes it possible to develop an SWC independently of other SWCs and provide it in a library as a fully tested unit. This can even go as far as making an SWC available as a COTS component.