Introduction to LIN
Motivation
Completion requirements
Electronifikation
Over the past decades, increasing numbers of functions have been developed for motor vehicles, which are intended to make car driving more comfortable, safer and environmentally friendly. In the process, more and more functions are implemented with electronic components, which have a growing need for the exchange of information. These electronic components include both ECUs and sensors and actuators.
Motivation
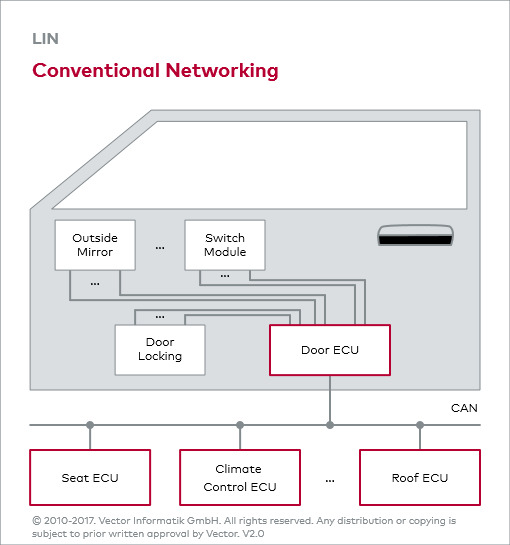
For a long time, it was usual to connect sensors and actuators to an ECU via individual wires (see figure: Conventional Networking). However, the rising number of connections led to thicker and heavier wire harnesses, which had greater weight and space requirements. Furthermore, it was more complicated to produce them for different vehicle versions, because too many custom modifications had to be made. Moreover, the increased number of lines made the systems more susceptible to errors. Finally, these problems led to continually growing costs for vehicle networking.
CAN as Pioneer>
In 1983, CAN was developed by Robert Bosch GmbH, and in 1986 it was presented as a new serial bus system at the SAE Congress. The introduction of CAN enabled bit-serial transmission of multiple signals on one wire pair, which made it possible to reduce the number of lines needed.
Cost reduction
Nonetheless, CAN was too expensive for connecting cost-effective sensors and actuators in the convenience area. In the mid-1990s some automotive OEMs and suppliers began to develop more economical solutions. However, since these proprietary bus systems involved low part volumes, they only offered limited cost relief. That is why some OEMs joined together to form the LIN Consortium whose goal was to develop a uniform, standardized and cost-effective communication system.
Last modified: Friday, 27 April 2018, 9:33 AM