Principle
LIN Communication
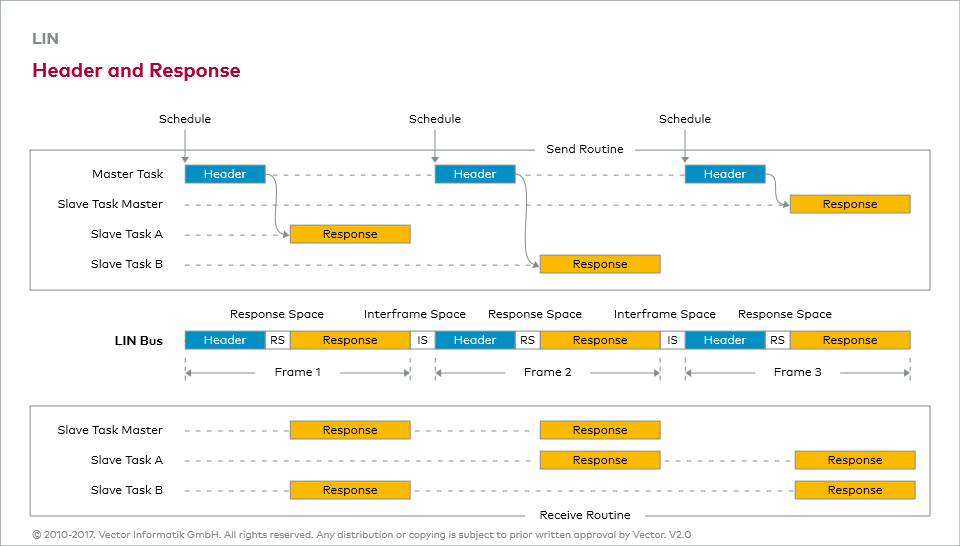
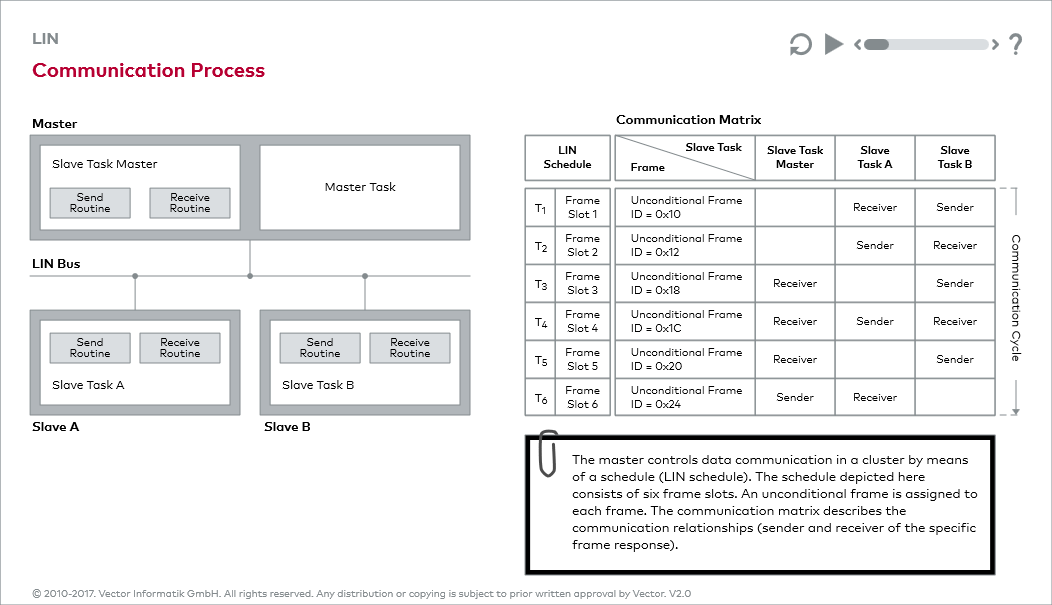
Communication in a cluster is based on a master-slave architecture. This means that there is always one node which, as master, controls all communication between the various slaves. The control is implemented by only allowing the subordinate slaves to transmit information when they are requested to do so by the privileged master. The master does this by sending a request (frame header) on the bus, which the respective slave supplements with a response (frame response). This combination of request and response is known as a frame (see figure: Frame).
Bus Access
Since the master delegates sending of each response in a cluster, the bus access method is referred to as Delegated Token. Its advantage lies in nearly collision-free communication, which enables predictable data transmission. This is because only defined responses can occur to individual requests by the master, and this makes it possible to establish a sending scheme (Schedule). As a result, the Delegated Token method is classified as a deterministic bus access method.
Restrictions
A disadvantage in central control by a master is that the master can fail, which results in failure of all communication. Therefore, the bus system is not suitable for safety-critical applications in which functionality must be guaranteed. Another weakness is that it is not equipped for event-driven communication. Since a request by the master is always necessary, the individual slaves cannot autonomously access the bus to send messages.
Message Types
To compensate for the disadvantage related to event-driven communication, LIN was extended with additional messages. These messages enable sending behaviors that deviate from the principle of the Delegated Token. There are a total of four message types, which are known as the Unconditional Frame, Sporadic Frame, Event Triggered Frame and Diagnostic Frame.