Event Triggered Frame
Feature
This message type is used to transmit event-driven information, which needs to be sent by a node as necessary. Essentially, an event triggered frame is equivalent to a standardized Unconditional Frame. The difference is that multiple slaves may send a response to a header from the master.
Functionality
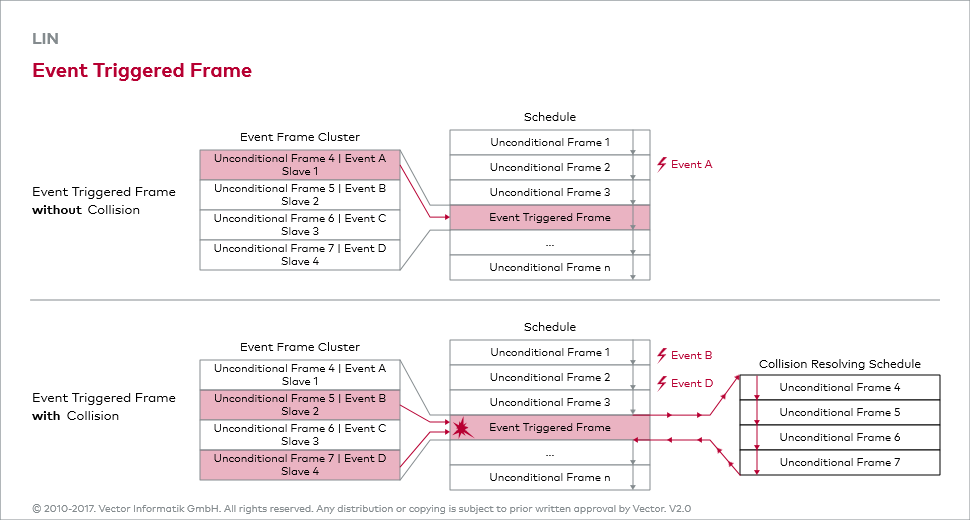
When the master sends a header with the identifier for an event triggered frame, the assigned slaves may append their specific responses to it. Since only one response may be sent after the header, the first data byte contains an additional PID. This makes it possible to determine which node has sent its response on the bus. To ensure that the length of an event triggered frame is clearly defined, all potential responses have the same number of data bytes.
Risk of Collisions
Since multiple nodes may generate a response to an event triggered frame, it is possible for collisions to occur. The master resolves these collisions with a Collision Resolving Schedule. This is a special sending scheme in which the responses of the slaves are polled again and are handled as regular unconditional frames. The master begins to process the Collision Resolving Schedule after detecting a collision, and it then jumps back to the originally exited Schedule. This guarantees that all open responses that need to be sent can actually be sent.