Funktionssoftware
Softwarekomponenten
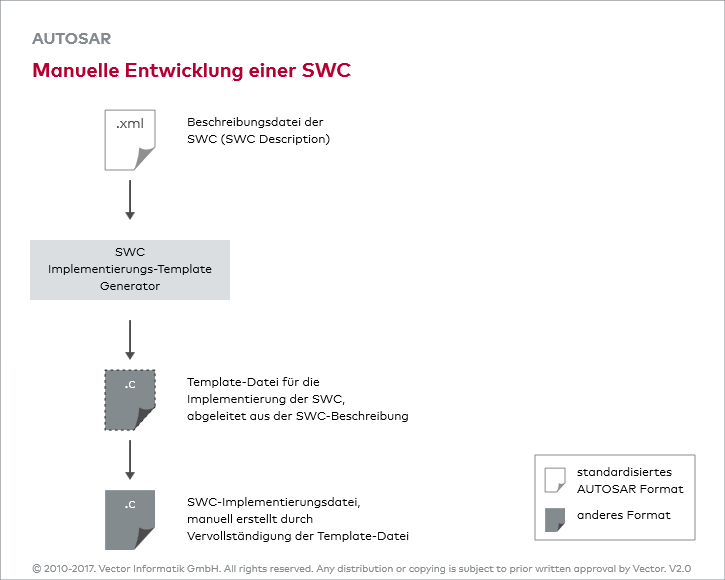
Die Funktionssoftware eines Steuergerätes ist in AUTOSAR über Softwarekomponenten realisiert. Das Kernprinzip besteht darin, eine formale Beschreibung der SWC zu erstellen (SWC Description), aus der sich die C-Schnittstellen der SWC ableiten. Die SWC Description wird in einer XML-Datei in einem von AUTOSAR definierten Schema abgelegt.
Passend zur SWC Description wird die Implementierung der SWC erstellt. Hierbei gibt es folgende Möglichkeiten:
- Manuelle Entwicklung
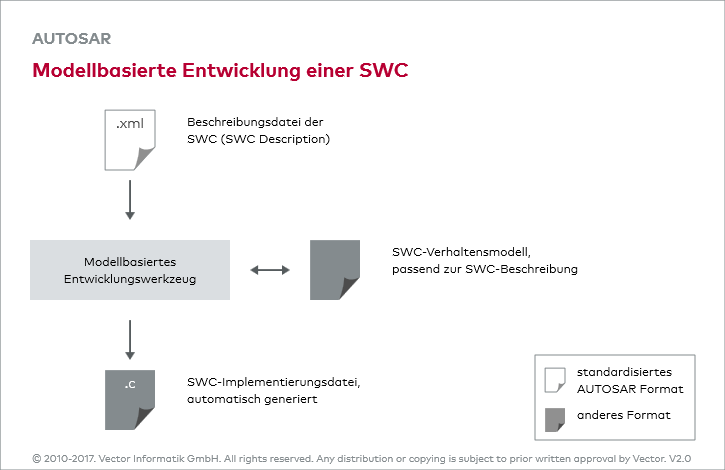
Die Implementierung der SWC wird traditionell durch manuelle C-Codierung erstellt. - Modellbasierte Entwicklung
Zur Implementierung wird ein Verhaltensmodell der SWC erstellt. Basierend auf diesem Modell wird der C-Code automatisch generiert.
Hardwareunabhängigkeit
Das AUTOSAR Konzept der SWC zeichnet sich dadurch aus, dass die Implementierung der SWC ausschließlich vom Mikrocontroller unabhängige Schnittstellen hat. Damit sind die technischen Voraussetzungen gegeben, um die SWC auf unterschiedlichen Hardware-Plattformen betreiben zu können und damit eine bessere Wiederverwendung der SWC in verschiedenen Steuergeräten zu erreichen. Selbstverständlich gibt es Randbedingungen, die eine beliebige Inbetriebnahme einer SWC auf jedem beliebigen Steuergerät verhindern. So erscheint es heute nicht sinnvoll, eine Motorsteuerungsfunktion auf einem Türsteuergerät laufen zu lassen, selbst wenn dieses seitens der Schnittstellen möglich wäre.
Wiederverwendung
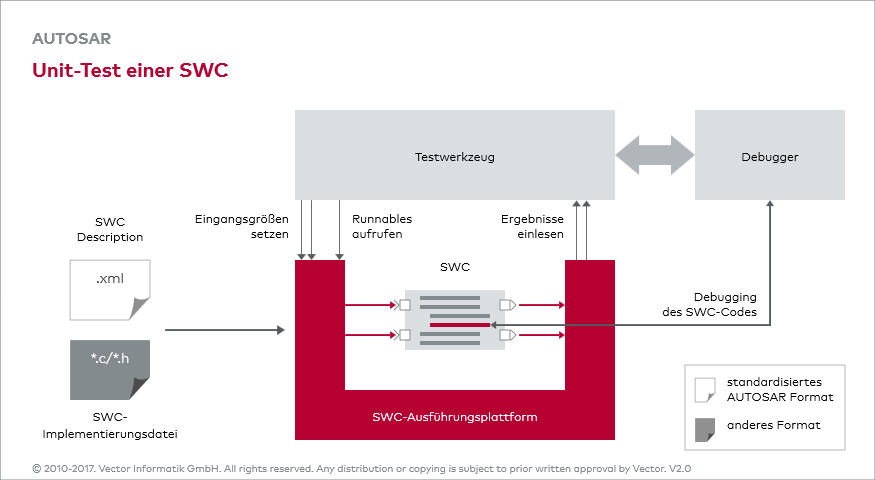
Um eine Wiederverwendung in realen Entwicklungsprozessen zu ermöglichen, ist neben der Schnittstellenkompatibilität auch die Absicherung der SWC-Funktion an sich relevant. Dank der definierten Schnittstellen der SWC lassen sich nun auch Testkonzepte wie ein Unit-Test der SWC durchführen. Damit kann eine SWC unabhängig von anderen SWCs entwickelt werden und als in sich getestete Einheit in einer Bibliothek bereitgestellt werden. Dies kann sogar soweit führen, dass eine SWC als COTS erhältlich ist.