AUTOSAR入門
機能ソフトウェアの開発
完了要件
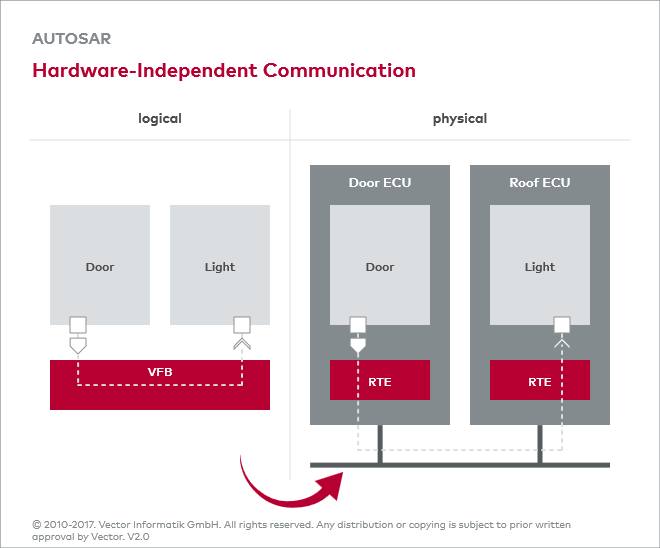
最初にシステム全体として車両の機能ソフトウェアが記述されています。システム全体はSWCとして記述されているサブ機能に分割されます。これらのSWCは定義されたインターフェース (Port) を使用して他のSWCへ情報 (Data Element) を送信します。
SWC間の通信の全てはVFBによって概念的に処理されます。開発中の時点では、どのソフトウェアコンポーネントがどのECUに割り当てられているか確立されず、単に論理的な視点となります。VFBはECU内とECU間の通信を表します。アプリケーションは基盤となる技術の情報を持っていません。これにより、ハードウェアから独立してアプリケーションソフトウェアを開発し使用する事が出来ます。
全SWCとインターフェースが設定と定義をされた後、関連ECUに分散されます。
その後、ECU固有のRuntime Environmentで、Virtual Functional Busを実装します。RTEは各ソフトウェアコンポーネント間の通信を整え、オペレーティングシステムによってソフトウェアコンポーネントの実行を扱います。
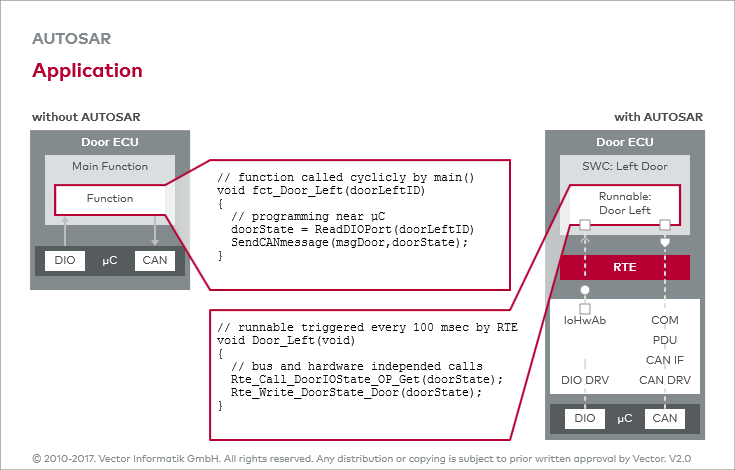
Runnable Entityは最終的にCの関数として実装される実行ユニットです。Runnable Entityへの関数呼び出しは開発者によって構成され、後でRTEにより実装されます。これは定期的または自発的にデータ要素の受信に応答するかもしれません。
AUTOSARは通信インターフェースとしてPortを提供します。ここでは2つの方法に区別されます:
- Sender-Receiver(SR) の通信は、データエレメントが1つのソフトウェアコンポーネントから別のコンポーネントへ送信されます。このような通信はアプリケーション・ソフトウェアコンポーネント間で頻繁に使用されます。
構文の例: Rte_Write_<Port_Name>_<Data_Element_Name>(…) - Client-Server(CS) の通信では、クライアントがサーバーに非同期または同期動作を呼び出します。これは関数呼び出しに相当し、ベーシックソフトウェア(診断、メモリー管理など)のアプリケーションとサービス間で最も頻繁に行われます。
構文の例: Rte_Call_<Port_Name>_<Operations_Name>(…)
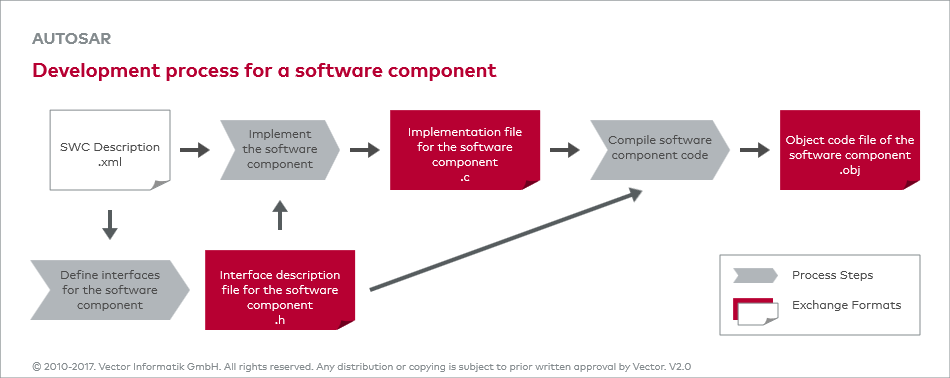
SWCのインターフェースとrunnableは別途作成したSWC Descriptionに記載されています。しかし、AUTOSARは機能的な振る舞いを記述する任意の機能は提供していません。
最終更新日時: 2019年 03月 6日(水曜日) 08:55