LIN入門
モチベーション
完了要件
電子化
過去数十年にわたって、自動車が快適性、安全性、環境性能の向上を目的とした機能が開発されてきました。その過程で情報交換への要求が高まり電子部品に多くの機能が実装されました。これらの電子部品はECUとセンサー、アクチュエーターの両方が含まれます。
モチベーション
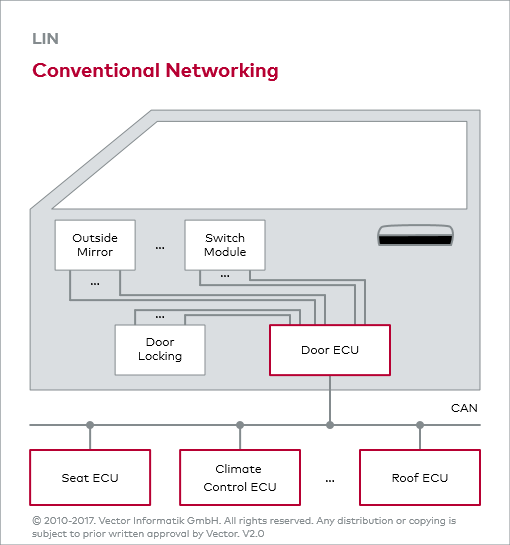
今までは個別の配線でECUからセンサーとアクチュエーターへ接続される事が通常でした。ただし、接続数が増加する事により、重量が増し、配線場所が必要となる太く重いワイヤーハーネスになっていきました。さらに、多くの独自の修正が必要になり様々な車両用を設計するのが複雑になりました。また、配線が増加するとシステムがエラーの影響を受けやすくなります。最終的に、これらの問題は車両ネットワークのコスト増加につながっていきます。
パイオニアとしてのCAN
1983年にCAN はRobert Bosch GmbHによって開発され、1986年にSAE Congressで新しいシリアルバスシステムとして発表されました。CANの導入により必要な配線数の削減を可能にし、1つのペア線で複数のシグナルのシリアル送信を可能にしました。
コスト削減
しかしCANは、快適装備エリアでのセンサーやアクチュエーターを接続するためには非常に高価でした。1990年代半ばに、いくつかの自動車メーカーとサプライヤーは、より経済的なソリューションを開発し始めました。しかし、生産数が少ない独自のバスシステムはコスト低減が限定的となっていました。これが、複数OEMが均一で標準化されコスト対効果の高い通信システムの開発を目的としたLINコンソーシアムを形成し参加した理由になります。
最終更新日時: 2019年 05月 27日(月曜日) 11:00