LIN入門
Network Management
完了要件
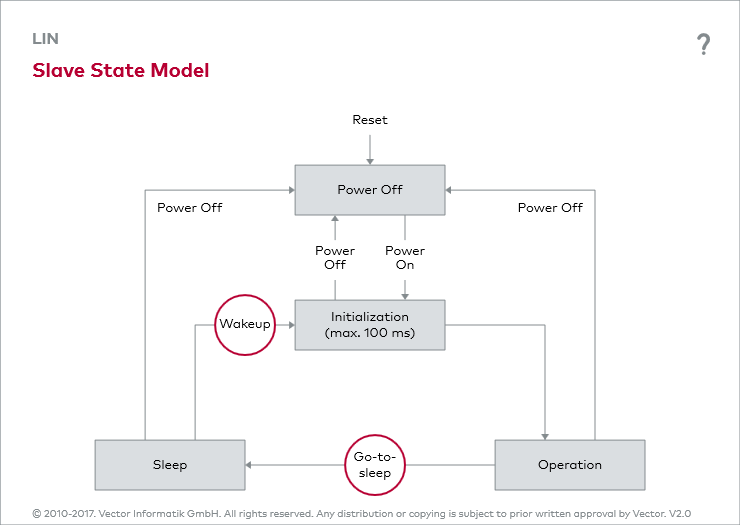
ステートマシーン
独立したNetwork Managementはプロトコルで定義されています。それはスレーブの4種類のState用として用意されます: Power Off、 Initialization、 Operation、 Sleep。 State遷移は同様に定義されます。電源投入時にスレーブはInitialization Stateになります。 これは100mS以内に完了しなければいけません。次にスレーブが自主的にOperating Stateに切り替わります。
スリープコマンド
マスターがGo-to-sleepコマンドを送信することで、全スレーブをSleep stateにする事が出来ます。 このコマンドは最初のデータバイト値を0x00(NAD=0に対応)としたMaster Request Frameになります。 残りの7データバイトは0xFFで送信されます。
スタンドアローンスリープ
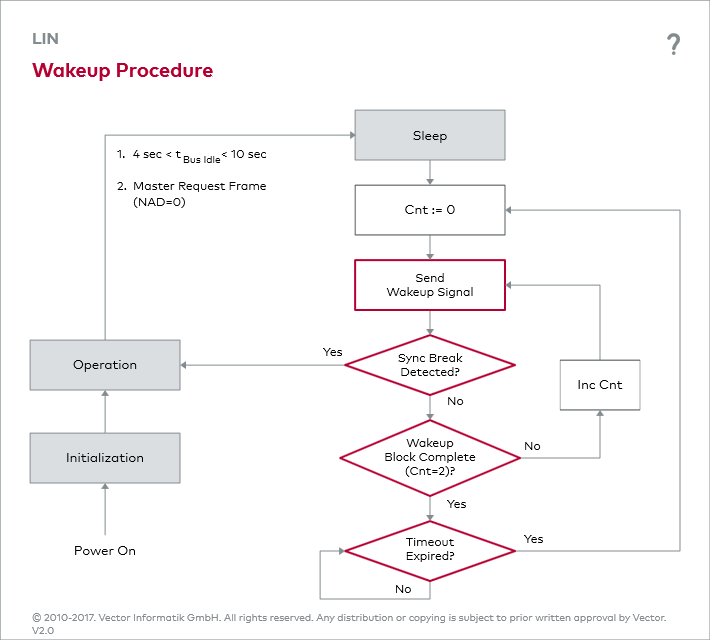
スレーブは4~10秒間バスアクティビティが無い場合Sleep Stateへ遷移します。仕様ではLow Power Stateへの遷移は、このStateへの遷移が絶対に必要ではありません。これはマイクロコントローラーが不必要なハードウェアリソースが遮断されているEnergy Saving Modeに完全に切り替わっていない事を意味しています。
Wake up
マスターに加えて、各スレーブはクラスターをWake upさせる能力を持っています。Wake upを行うにはバスにWake Up信号を配置します。この信号は最小250μS、最大5mSの持続ドミナントパルスとなります。Wake upを検出した後、ノードはSleep Stateから抜けInitialization Stateへ遷移します。 その100mS後にOperation Stateへ切り替わります。
"Sleepy" Master
スレーブがWake Upを担当しInitialization後150mSでヘッダーを検出しない場合、ノードは別のWake Up信号を送信します。これと次のWake Up試行が失敗した場合(3 wakeup signals = 1 wakeup block)、スレーブはWake Up手順を1.5S停止し、適用可能な場合には再度開始出来ます。これはシステム設計要件に依存します。
最終更新日時: 2019年 05月 27日(月曜日) 11:54