LIN入門
プロセス
完了要件
マスタータスク /
スレーブタスク
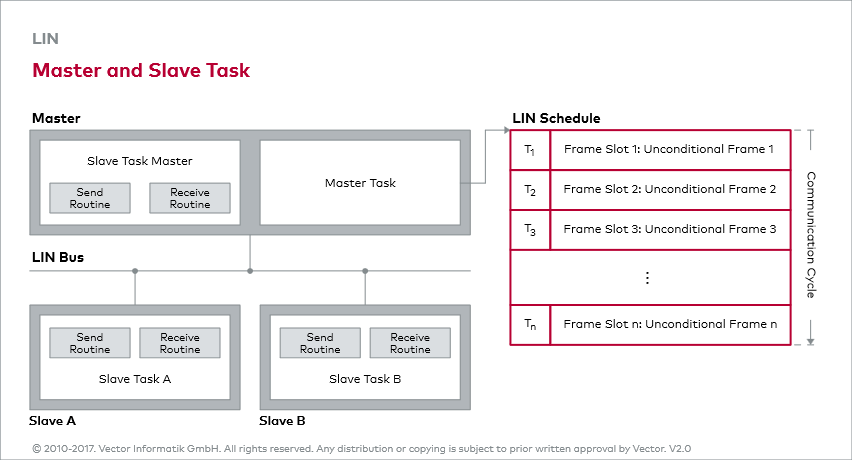
通信コントローラーが無いので、プロトコルはマイクロコントローラー上のソフトウェアコンポーネントとして実行されます。これは特定のノードが目的の通信を行うために必要とされるマスター・タスクまたはスレーブ・タスクを受け取り行われます。原則として、各ノードは情報を送受信するのに使用するスレーブ・タスクを持っています。マスターは、送信する権利を委任し、バスアクセスを制御する追加マスター・タスクを持っています。
マスターの特性
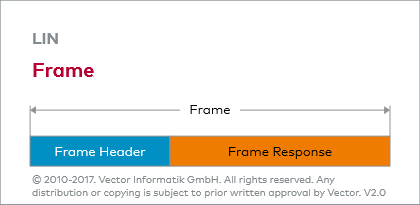
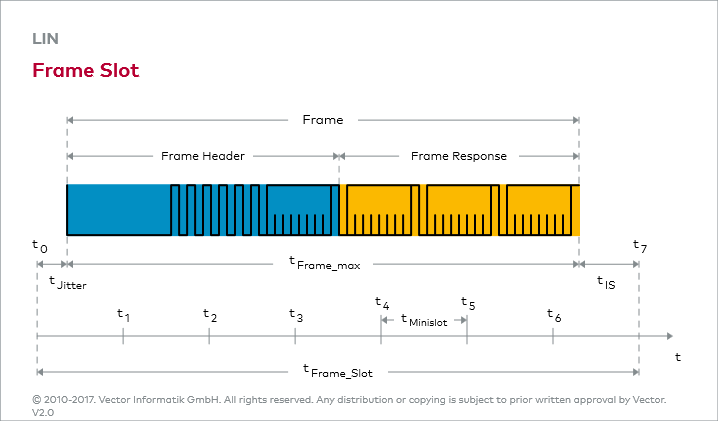
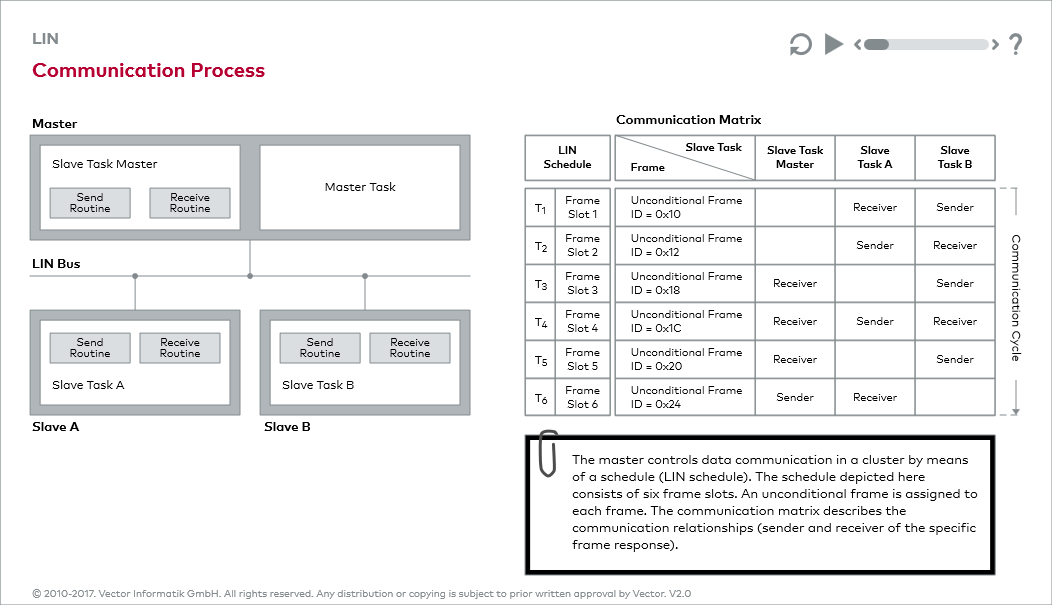
ネットワークが動作すると即、マスター・タスクがマスターで起動されます。マスター・タスクが希望する送信計画を表すスケジュールの周期的な処理を開始します。スケジュールでは、スロットは各メッセージに対して定義されます。これらのスロットは、フレーム・ヘッダー とフレーム・レスポンスを送信する事が出来る十分な大きさである必要があります。完全なフレームがスロットで常に送信可能となります。
スレーブの特性
レスポンスの動作はスレーブ・タスクに対して定義されています。例えば、ヘッダーが受信された時にスレーブ・タスクがどう反応するかが正確に定義されています。可能なレスポンス動作は以下の通りです:送信、受信、レスポンスの無視。
送信されたレスポンスは原則的にどのスレーブ・タスクでも受信し使用する事が出来ます。各ノードの希望するレスポンス動作はLDFに記載されています。
最終更新日時: 2019年 05月 27日(月曜日) 11:30