電子支援システム
人々は自動車の燃費、利便性と安全性が電子機能によって実現されている事を知っている。例えば電子キーを自動検出しキー操作無しでロックを解除し車を始動する事が出来る電子アクセスシステムがあり、また長距離移動に利便性を提供する30km/hで開始する速度維持のクルーズコントロールなどがある。
しかし、ホイールの負荷変動を低減し、タイヤの接地を良好にする電子ダンパー制御など隠された機能も同様にあり、これは路面条件と車体の負荷状況から独立し車体の最適な振動特性を生成する。
最初は安全運転を向上させるための電子機能はなかなか受け入れられなかったが、現在では問題なく受け入れられている。 これは主にABSやESPなどのアクティブセーフティーシステムが自動車の増加と移動距離の増加にも関わらず事故数を削減することに重要な貢献をした事による。 車をより安全に運転すると言う目標で自動車産業は特に革新的なアクティブセーフティーと高度なドライバー支援機能の新しい開発を推進している。
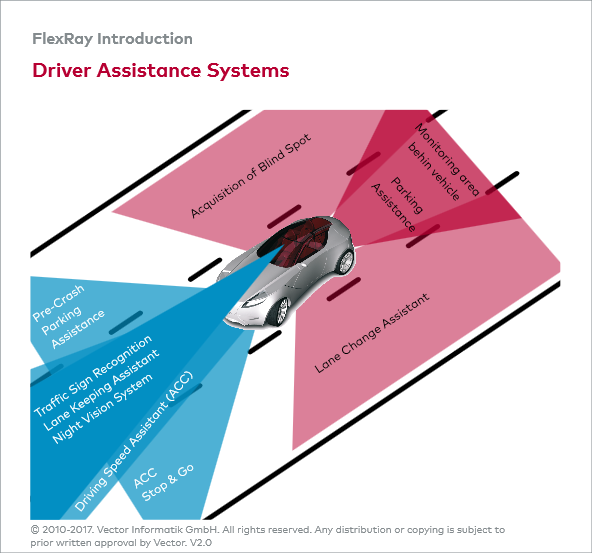
将来システムの一例は、交通状況に自動的に車両速度を適応させる電子アシスタントなどがある。他の電子アシスタントが継続的に最大50mの範囲で隣の車線を観察し、隣の車線に車両が検出された場合にドライバーが追い越しとレーンチェンジを行う時に警告する。 例えばパーキングアシストシステムなどが他の電子アシスタントになる。
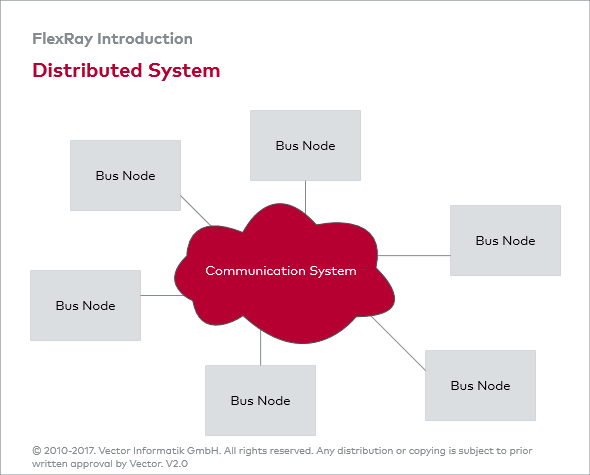
この背景には、これら全てのシステムの背後の制御アプリケーションが1台のECUだけでは無く、複数のECUが通信システム経由で情報を共有し動作する事を必要としている。それは自律的に動作するECUでは無く、近代的な安全とドライバー支援システムのバックボーン形成には分散システムが適し、これが増加する。
単純に通信システムを組み込むだけでは十分で無く、厳密に規定した時間ベースの因果の連鎖も同様に保証する必要がある。バス負荷から独立して決定論的なデータ通信を理想的に提供する通信システムが焦点となる、すなわち等間隔な信号伝送を保証する。 これはタイムトリガーアプローチのリアルタイム通信といえる。