FlexRay入門
Brake-by-wire
完了要件
自動車で伝統的に使われている機械と油圧システムのどちらの領域も電子化は避けられない。さらに大きなメリットがあるドライバー支援機能を実装するために、シャシーへの電子インターフェースはブレーキとステアリングシステムで主に必要とされている。
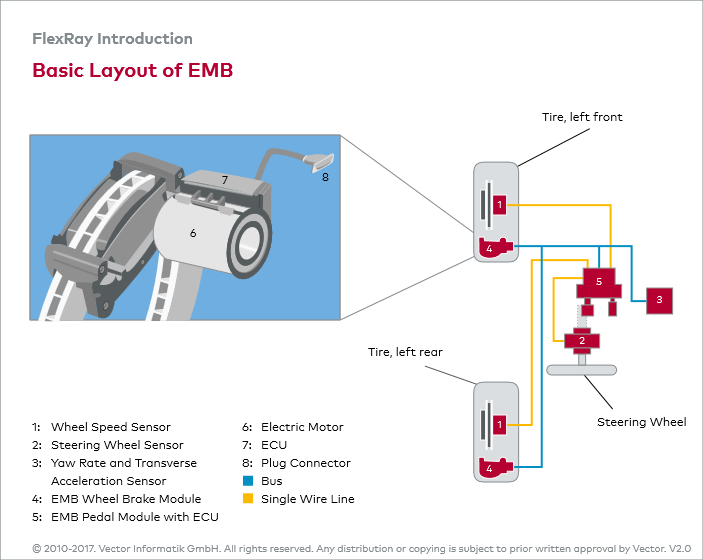
このような電子インターフェースの例として電気油圧と電気機械式ブレーキ-EMBがある。 電気油圧式ブレーキのブレーキキャリパーは依然として油圧制御されているが、電気機械式ブレーキのホイールへのブレーキ力は電気モーターによって生成される。 これらはペダル感知シミュレーター(フォースフィードバック)の電子ブレーキペダルの入力を取得する電子制御装置で制御される。 関連制御情報とセンサー信号は通信線を経由して伝送される。
このようなbrake-by-wireシステムは制動安定性を向上させる四輪独立ブレーキ動作を有効にするだけでは無く、ソフトウェアを変更する事によって簡単に各ドライバーにペダル特性とブレーキ効果を適応させる事が出来る。 最終的に、一部の電子装置が安全動作につながる診断能力を増加させる。 車両の動的制御においてブレーキへのbrake-by-wire能力の組み込みはアクティブセーフティー向上の大きな可能性となる。
brake-by-wireシステムの多面的可能性として、このようなシステムは依然として大きな安全上のリスクがある。 たった1つの障害や各システムコンポーネントの故障が深刻な影響をあたえる。 したがって、brake-by-wireシステムはフォールトトレラントで設計する必要がある。 それは、どのようなエラーが発生しても法的に定められた基本的ブレーキ機能を保証する唯一の方法になる。
最終更新日時: 2018年 11月 27日(火曜日) 13:35