FlexRay入門
FlexRayノード
完了要件
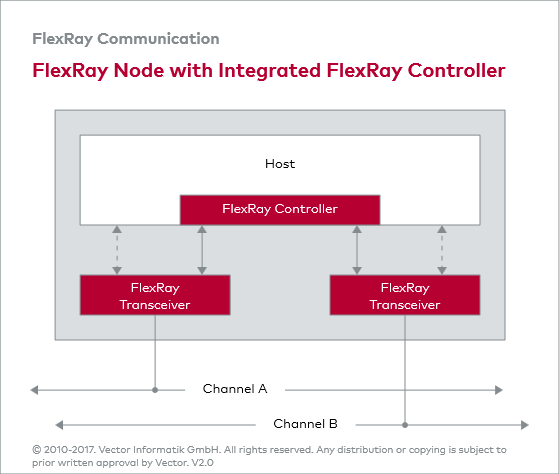
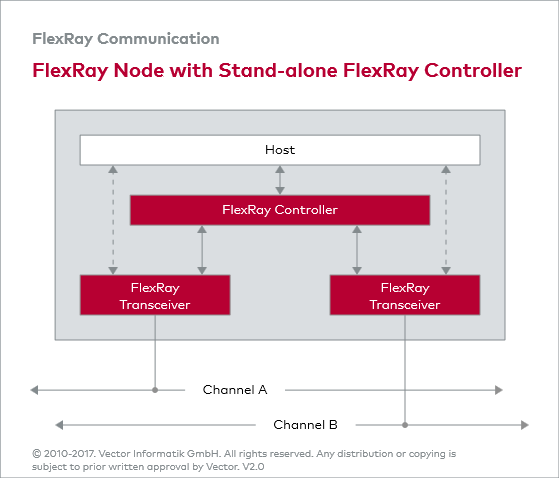
FlexRayノードはFlexRayインターフェース経由でFlexRayバスに接続されている電子制御装置(ECU)である。 FlexRayインターフェースはチャンネル数に応じて通信コントローラーと1つまたは2つのバスドライバーで構成される。通信コントローラーはFlexRayコントローラーと呼ばれる。バスドライバーはFlexRayトランシーバーと呼ばれる。
FlexRayコントローラーはFlexRay仕様で定義されている通信プロトコルを実行する。 FlexRayコントローラーの主なタスクは送信メッセージのコーディング、受信メッセージのデコーディングと同様にフレーミング、バスアクセス、エラー検出、エラー処理、同期、FlexRayバスのスリープ、ウェイクアップとなる。
FlexRayコントローラーはホストの周辺モジュールとして設計される。これは統合FlexRayコントローラーと呼ばれる。統合FlexRayコントローラーの利点はホストとFlexRayコントローラー間の簡単で迅速な通信にある。ただし、このソリューションは柔軟性を欠く。 FlexRayコントローラーがホストから分離するように構成されている場合に柔軟性が達成される。 この場合ではスタンドアローンFlexRayコントローラーを示す。
FlexRayトランシーバーはFlexRayコントローラーを物理伝送媒体につなぐ。FlexRayトランシーバーの主なタスクはシグナル変換になる。 一方で、FlexRayコントローラーで受信された論理信号ストリームを物理信号ストリームへ変換する。 別方向で受信した物理信号ストリームは論理信号ストリームへ変換する。
最終更新日時: 2018年 11月 28日(水曜日) 17:35