Steer-by-wire
今日の自動車のステアリングシステムは、必要な操舵力に応じ、油圧、電気油圧式または電動ステアリングアシストが装備されている。ステアリングアシストの種類に関わらず、これらのシステムはパワーアシストに問題があった場合、機械的に結合されているので、ステアリングとホイール間は機械的結合を保持している。
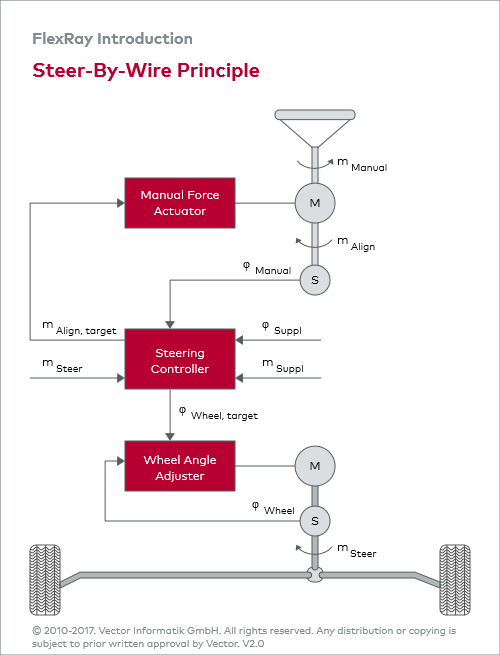
図で示すように電動ステアリングシステムではドライバーのステアリング入力は制御線経由でECUが受け入れて処理し動作させるアクチュエーターに制御線経由で制御コマンドとして送信される。 機械的結合ではステアリングホイール(マニュアル・フォース・アクチュエーター)にフィードバックする自己調節力フィードバックのシミュレート用のモーターと車輪(ホイール角度調整)を位置決めするアクチュエーターがある。 マニュアル・フォース・アクチュエーターとホイール角調整との間の整合はステアリングコントローラーが処理する。 ステアリングコラムは通信回線に置き換えられ、ドライバーは“by-wire”で操縦する。
可変ステアリングアシストとステアリング比を実装する他に-すなわちステアリング特性の各調整-steer-by-wireの原理に基づき、このシステムの最大の可能性はアクティブセーフティーを向上させるビークルダイナミクス制御をステアリングに取り込む事にある。 現在のESPシステムの論理的拡張として、ESP IIはドライビングダイナミクスとアクティブステアリング制御機能による安定性の新しい次元を開く。
ステアリングで障害が発生すると車両の制御を失うことを意味するので、当然ながらステアリングは自動車内でセーフティークリティカルなシステムと定義されている。これらのステアリングシステムへの機械的フィードバックの除去についてはセーフティークリティカルな車載電子システムの信頼性の議論を激化させている。 steer-by-wireシステムへの道筋で、フォールトトレランスに関する上記の項目と多くの複雑なタスクを解決する必要がある。