通信アーキテクチャー
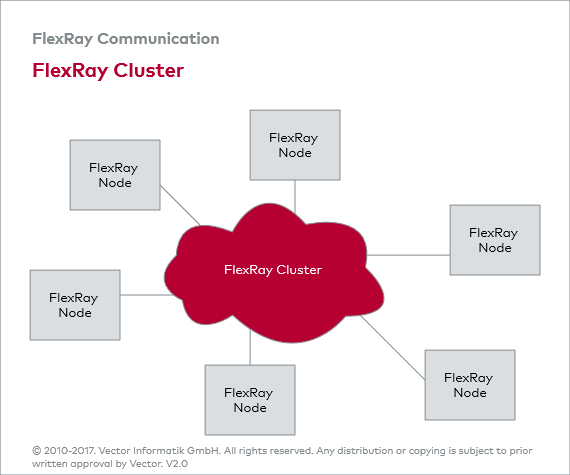
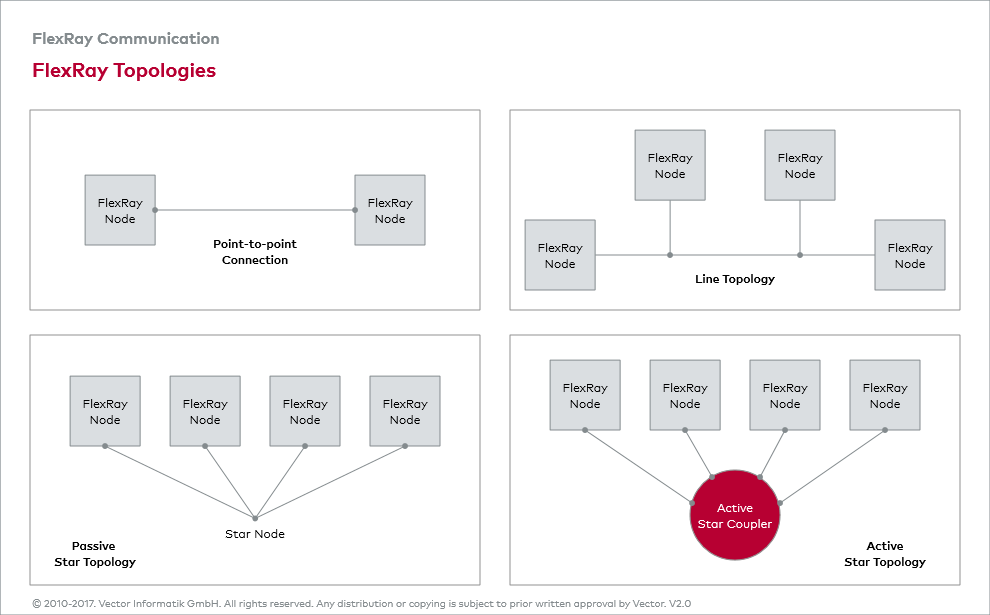
FlexRay通信システム(FlexRayクラスター)は複数のFlexRayノードと物理伝送媒体(FlexRayバス)で相互接続される全FlexRayノードで構成される。 FlexRay通信は特定の物理トポロジーに制限されないので、FlexRayクラスターは様々な異なる物理トポロジーに基づく。 point-to-point接続はライントポロジー、パッシブスタートポロジー、スタートポロジーなどと同様に可能になる。
障害のリスクを最小限に抑えるためにFlexRayは通信チャンネルの冗長レイアウトを用意している。 2つの通信チャンネルのそれぞれは最大10Mbit/sのデータ速度で動作させる事が出来る。しかし代替手段として、この冗長チャンネルを20Mbit/sのデータ速度とするために使用する事がある。FlexRayメッセージごとに個別にフォールトトレランスと伝送速度向上の選択が行える。
FlexRayクラスターは分散システムにおいて静的、時間定義トリガー動作のコア属性を持つタイムトリガー通信アーキテクチャーに基づいている。時間制御の原理は確定論的データ通信だけでは無く、動作の同期トリガーと統合冗長性によって達成されるフォールトトレランスと、その上に構築されるコンセプトの実装と通信システムのシンプルな構成となる。
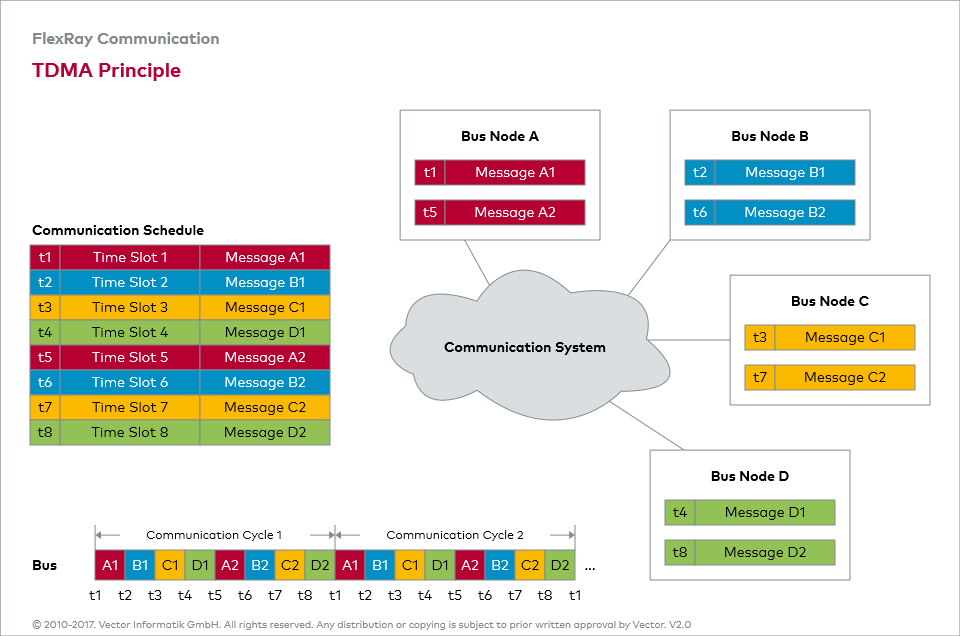
タイムトリガー制御を実装するためにTDMA方式(Time Division Multiple Access)を使用しているFlexRayノードは、CANのようにアプリケーション関連イベントに応答する制御されないバスアクセスが出来ない。 FlexRayノードは各FlexRayメッセージの通信サイクルごとに特定のタイムスロットを割り当て、全FlexRayメッセージの送信時間は正確に定義された通信スケジュールに従う必要がある。
図“TDMAの原理”には通信スケジュールと通信媒体上での通信フローの実例が示されている。通信スケジュールは4台のバスノードで構成され、各バスノードが特定の時間で2つのメッセージを送信しなければならない通信システムに基づいている。