FlexRay入門
安全とフォールトトレランス
完了要件
アクティブセーフティーとドライバー支援機能の潜在的な多面性は、大きな安全上のリスクがある-これは上記すべてのシャシーへの電子インターフェースを持つ電子システムに適用される。 たった1つの障害や各システムコンポーネントの障害が深刻な影響を持つ。 by-wireシステムの安全性を保証出来るようにするには、最初からシステムコンポーネントを完全にしてエラーを回避する努力が行われる。
もし、これらの努力にかかわらず、エラーが発生する場合、フォールトトレランスの補足コンセプトがシステム全体の仕様機能を維持するために適用される。 フォールトトレランスは発生したエラーを許容するための補足的な手段を必要とする。ここで情報冗長性と構造冗長性が区別される。信頼出来るデータ通信を保証する場合では、両方の冗長性が非常に重視される。
メタ情報として役立つ情報を追加する事によって情報冗長性が発生する。例:エラー検出とエラー訂正用。 システム仕様によって定義される障害が無いアプリケーション機能を維持するために-たとえエラーが障害情報の形でバスノードなどの通信関連コンポーネントで発生した場合でも-通信システムは基本動作では不必要なコンポーネントを追加する事で拡張出来る(構造冗長性)。
基本的な区別は2種類の冗長性のアクティブ化で行われる:継続的にアクティブな静的冗長性とエラー発生時までアクティブ化されない動的冗長性。分散型セーフティークリティカルなシステムのリアルタイム能力の非常に厳しい要件があるため、静的冗長性の原理だけは、この領域で実装される通信システムを考慮している。
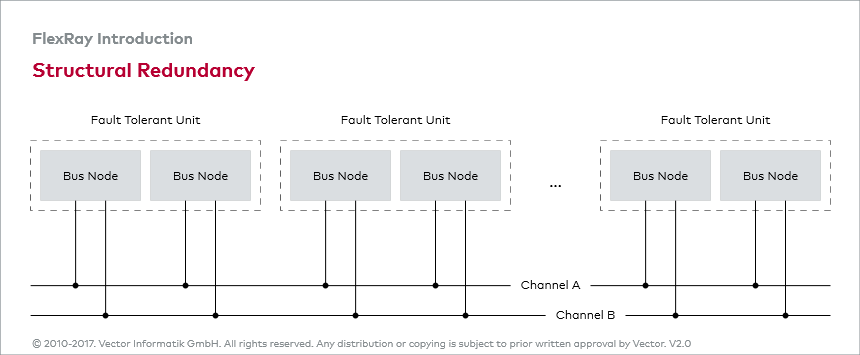
安全性のリスクを最小限におさえるため、特にby-wireシステムの状況で同じ情報が両方の通信チャンネルで伝送されなければならないという要求により、冗長レイアウトの通信チャンネルが同様に提供される。 それが1つのチャンネルで発生する障害を許容する唯一の方法になる。図“構造的冗長性”はバスノードと物理的ライントポロジーに基づく通信システムの通信チャンネルの冗長レイアウトを示している。
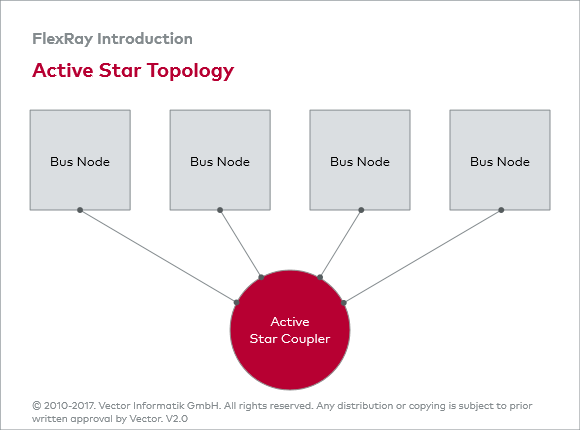
物理的トポロジーの選択は、通信システムのフォールトトレランスに影響を与える。もしシステム設計者がアクティブスタートポロジーの使用を決定した場合、アクティブスターカプラーから障害のある通信ブランチを切断することによってエラーの伝搬を回避出来る。
最終更新日時: 2018年 11月 27日(火曜日) 13:48