Motivation
Elektronifizierung
Über die letzten Jahrzehnte wurden immer mehr Funktionen für Kraftfahrzeuge entwickelt, die das Autofahren komfortabler, sicherer und umweltfreundlicher machen sollen. Dabei werden immer mehr Funktionen mit Hilfe von elektronischen Komponenten realisiert, die einen wachsenden Bedarf an Informationsaustausch haben. Zu diesen elektronischen Komponenten gehören sowohl Steuergeräte, als auch Sensoren und Aktoren.
Motivation
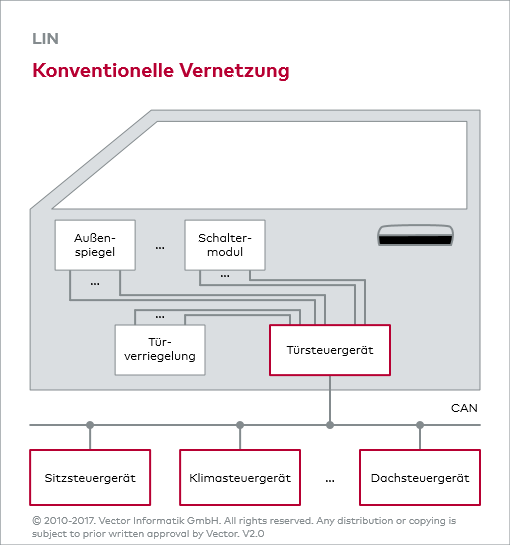
Es war lange Zeit üblich, dass Sensoren und Aktoren mittels einzelner Leitungen mit einem Steuergerät verbunden wurden (siehe Grafik Konventionelle Vernetzung). Die steigende Verbindungszahl führte allerdings zu immer dickeren und schwereren Kabelbäumen, die einen größeren Gewichts- und Platzbedarf erforderten. Außerdem wurde deren Herstellung für unterschiedliche Fahrzeugvarianten komplizierter, da zu viele individuelle Anpassungen vorgenommen werden mussten. Ergänzend nahm die Fehleranfälligkeit durch die erhöhte Anzahl an Leitungen zu. Diese Probleme führten letztendlich zu immer weiter steigenden Kosten für die Fahrzeugvernetzung.
CAN als Vorreiter
1983 wurde CAN von der Robert Bosch GmbH entwickelt und 1986 auf dem Kongress der SAE als neues serielles Bussystem vorgestellt. Die Einführung von CAN ermöglichte die bitserielle Übertragung von mehreren Signalen auf einem Leiterpaar, sodass die benötigte Anzahl an Leitungen reduziert werden konnte.
Kostenreduktion
Für die Anbindung von kostengünstigen Sensoren und Aktoren im Komfortbereich, war CAN zu teuer. So begannen Mitte der 1990er Jahre einige Fahrzeughersteller und Zulieferer mit der Entwicklung von preiswerteren Lösungen. Da diese herstellerbezogenen Bussysteme allerdings zu geringen Stückzahlen führten, war eine Kostenreduzierung nur bedingt möglich. Aus diesem Grund schlossen sich einige Hersteller zum LIN Consortium zusammen, um ein einheitliches, standardisiertes und kostengünstiges Kommunikationssystem zu entwickeln.