Mechanismen
Datenintegrität
Sicherheit bei der Datenübertragung ist die Voraussetzung für die Zuverlässigkeit elektronischer Systeme im Kraftfahrzeug. Trotz elektromagnetisch verträglichem Design kann es zu Bitfehlern während der Übertragung kommen. Zur Erhöhung der Datenintegrität sind Fehlererkennungsmechanismen und eine effektive Fehlerbehandlung erforderlich.
Fehlerbehandlung
Im Rahmen des Status Managements sind diverse Fehlererkennungsmechanismen und eine Art von Fehlersignalisierung definiert (siehe Grafik Fehlererkennung). Die Fehlerbehandlung ist allerdings nicht vorgegeben. Diese kann bei Bedarf in der Implementierung festgelegt und umgesetzt werden.
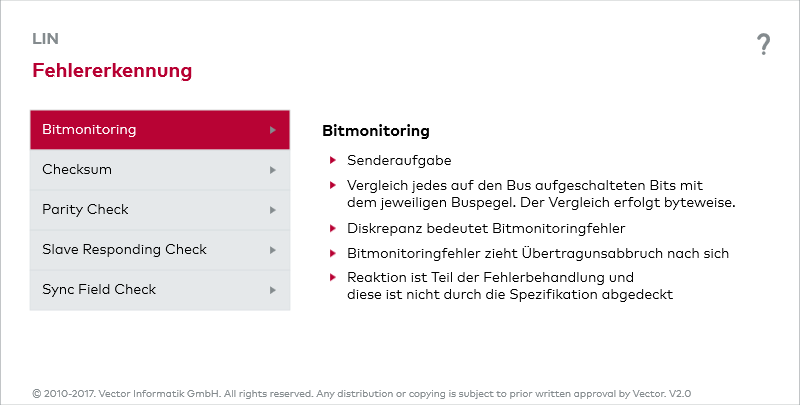
Fehlererkennung
Folgende Fehlererkennungsmechanismen stehen zur Verfügung:
- Prüfung des Übertragungsmediums auf Kurzschluss,
- Prüfung des Sync Fields,
- Bitmonitoring zur Prüfung der Sendepegel,
- Erkennung von Übertragungsfehlern durch die Prüfung der im Frame Header übertragenen Paritätsbits (Parity Check) sowie
- Erkennung von Übertragungsfehlern durch die Prüfung der in der Frame Response übertragenen Prüfsumme (Checksum Check) und schließlich
- Prüfung, ob im Anschluss an einen Frame Header eine Frame Response übertragen wurde (Ausnahme: Event Triggered Frame).
Status Management
Das Status Management dient zu Erkennung von fehlerhaften Slaves. Trotz defekter Knoten soll der Kommunikationsbetrieb aufrecht erhalten werden. Der Master führt das Status Management durch. Die Slaves müssen ihren Status hierzu einmal pro Kommunikationszyklus mitteilen.
Statusbit
Um den Status mitzuteilen, verfügt jeder Slave über ein eigenes Statusbit. Dieses wird je Sendezyklus mit einem Unconditional Frame übertragen und vom Master ausgewertet. Dieses Bit ist rezessiv, wenn der Slave während des letzten Kommunikationszyklus einen Fehler erkannt hat. Liegt kein Fehler vor, wird das Statusbit dominant übertragen.