Einführung in LIN
Prinzip
Abschlussbedingungen
Kommunikationsprinzip
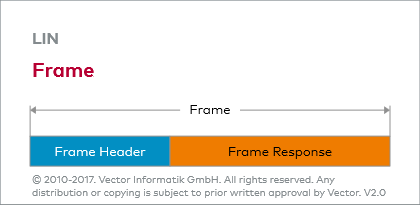
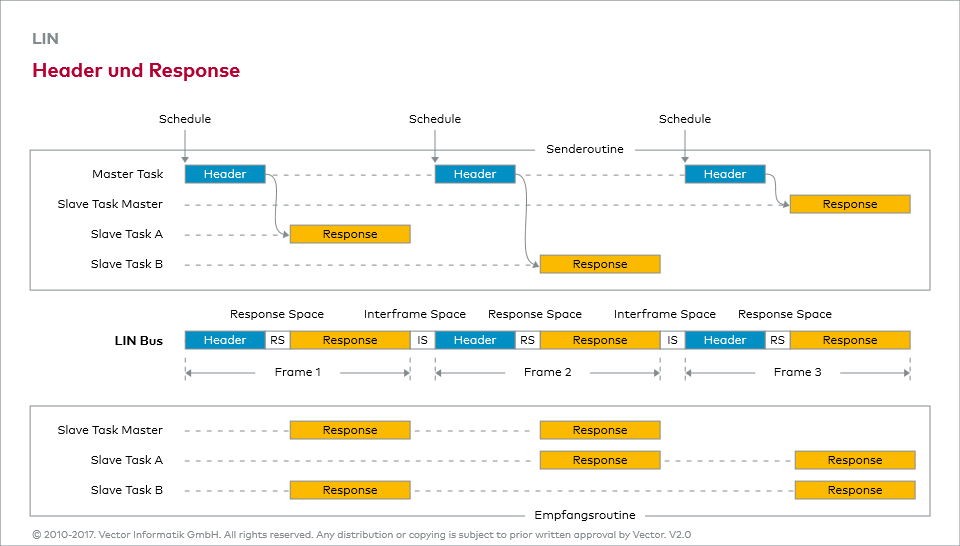
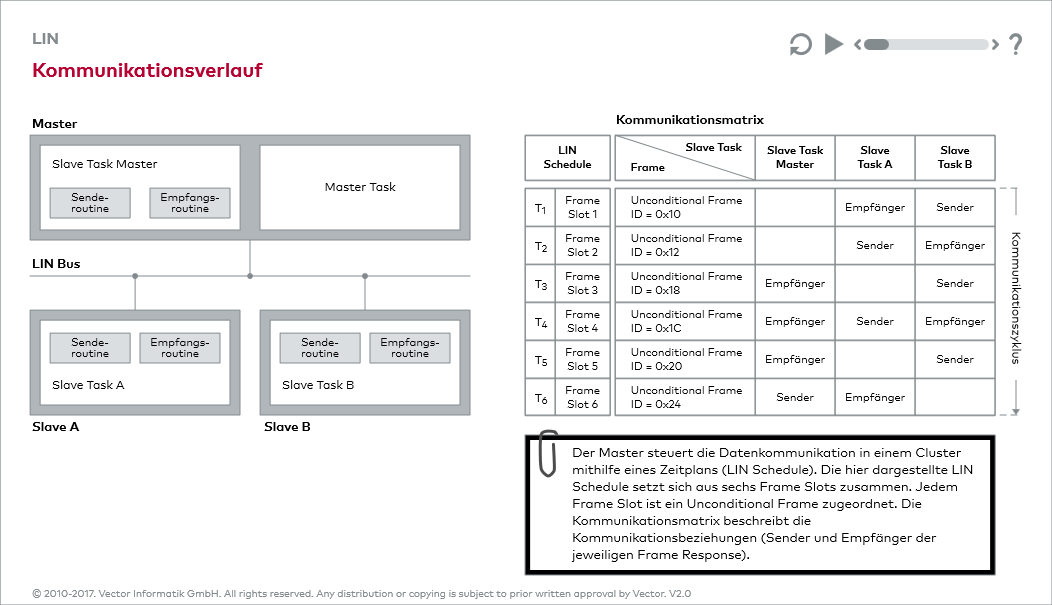
Die Kommunikation in einem Cluster basiert auf einer Master-Slave-Architektur. Das bedeutet, dass es immer einen Knoten gibt, der als Master die gesamte Kommunikation zwischen den unterschiedlichen Slaves steuert. Die Steuerung resultiert daraus, dass die untergeordneten Slaves erst dann Informationen übertragen dürfen, wenn eine Aufforderung durch den privilegierten Master erfolgt. Hierzu sendet dieser eine Anfrage (Frame Header) auf den Bus, die vom jeweiligen Slave um eine Antwort (Frame Response) ergänzt wird. Diese Kombination aus Anfrage und Antwort wird Frame genannt (siehe Grafik Frame).
Buszugriff
Da der Master das Senden von jeder Response in einem Cluster delegiert, bezeichnet man das Buszugriffsverfahren als Delegated Token. Dessen Vorteil besteht in einer nahezu kollisionsfreien Kommunikation, die eine vorhersagbare Datenübertragung ermöglicht. Dies ist damit zu begründen, dass auf die einzelnen Anfragen des Masters nur definierte Antworten folgen können und somit ein Sendeschema (Schedule) festlegbar ist. Aus diesem Grund gehört Delegated Token zu den deterministischen Buszugriffsverfahren.
Einschränkungen
Ein Nachteil bei der zentralen Steuerung durch einen Master besteht darin, dass dieser ausfallen kann und somit die gesamte Kommunikation zum Erliegen kommt. Das Bussystem eignet sich daher nicht für sicherheitskritische Anwendungen, in denen die Funktion gewährleistet werden muss. Eine weitere Schwachstelle dieses Buszugriffsverfahrens ist, dass es für eine ereignisorientierte Kommunikation nicht ausgelegt ist. Da immer eine Anfrage durch den Master benötigt wird, können die einzelnen Slaves nicht selbsttätig auf den Bus zugreifen um Botschaften zu senden.
Botschaftstypen
Um den Nachteil bei der ereignisorientierten Kommunikation ausgleichen zu können, wurde LIN um zusätzliche Botschaften erweitert. Diese ermöglichen weitere Sendeverhalten, die vom Prinzip des Delegated Token abweichen. Insgesamt gibt es vier Botschaftstypen, die als Unconditional Frame, Sporadic Frame, Event Triggered Frame und Diagnostic Frame bezeichnet werden.
Zuletzt geändert: Donnerstag, 26. April 2018, 16:32