Einführung in LIN
Event Triggered Frame
Abschlussbedingungen
Besonderheit
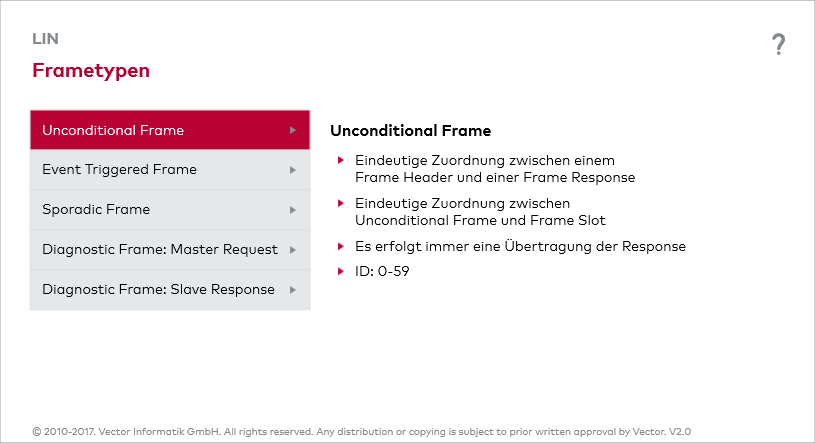
Dieser Botschaftstyp dient zur Übertragung von ereignisorientierten
Informationen, die bei Bedarf von einem Knoten zu senden sind. Vom
Grundprinzip entspricht ein Event Triggered Frame einem standarisierten Unconditional Frame. Der Unterschied besteht allerdings darin, dass auf einen Header vom Master mehrere Slaves eine Antwort senden können.
Funktionsweise
Wenn der Master einen Header mit dem Identifier für einen Event
Triggered Frame sendet, dürfen die zugewiesenen Slaves ihre jeweilige
Antwort anhängen. Da immer nur eine Response hinter dem Header gesendet
werden darf, enthält das erste Datenbyte einen zusätzlichen PID.
So ist ermittelbar, welcher Knoten seine Antwort auf dem Bus übertragen
hat. Damit die Länge eines Event Triggered Frames eindeutig festlegbar
ist, haben alle potentiellen Antworten die gleiche Anzahl an Datenbytes.
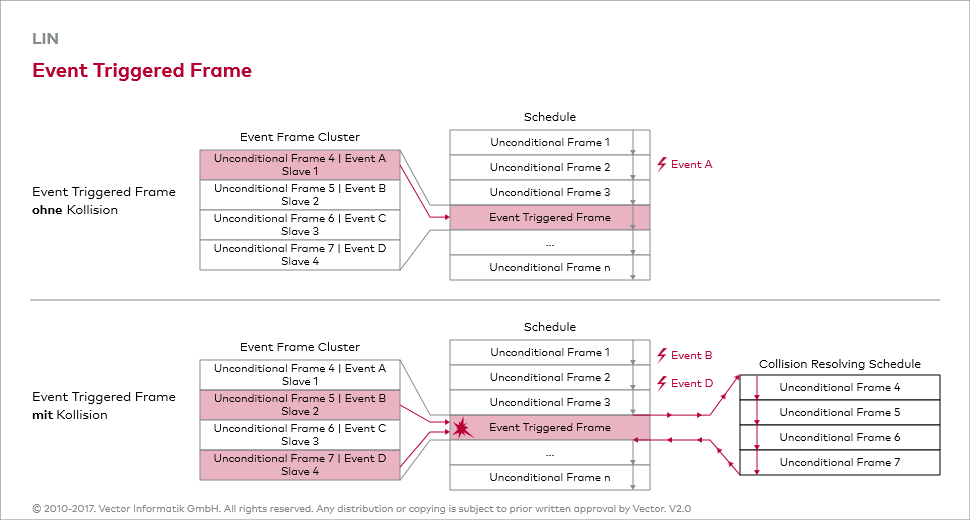
Kollisionsgefahr
Da mehrere Knoten eine Antwort für einen Event Triggered Frame generieren können, sind Kollisionen nicht ausgeschlossen. Der Master löst diese Kollisionen mit einer Collision Resolving Schedule auf. Hierbei handelt es sich um ein spezielles Sendeschema, in dem die Antworten der Slaves erneut abgefragt und als reguläre Unconditional Frames behandelt werden. Der Master startet die Abarbeitung der Collision Resolving Schedule nach Erkennung einer Kollision und springt anschließend in die ursprünglich verlassene Schedule zurück. So wird garantiert, dass alle anstehenden Antworten gesendet werden können.
Zuletzt geändert: Mittwoch, 4. April 2018, 09:24