- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Motivation for CAN
Completion requirements
Electronification
The more recent history of the automobile is characterized by intensive electronification. The driving force for this can be traced primarily to continual growth of customer wishes for a modern automobile. In addition, increasingly stricter regulations are being legislated for exhaust emissions. Another factor is globalization, which increases competitive and cost pressures that result in continual innovative pressure.
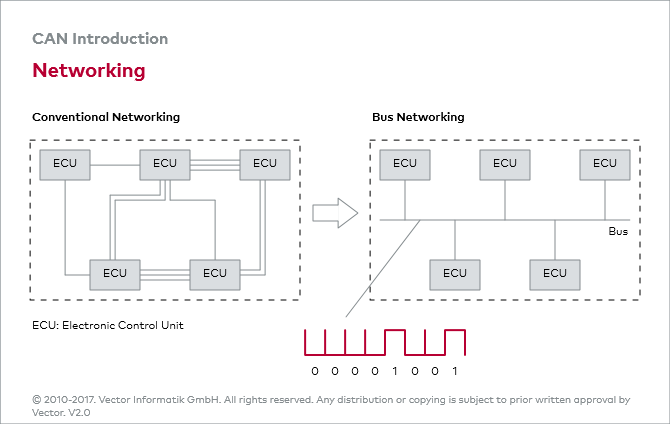
Data transmission
At first, independently operating electronic ECUs were sufficient to implement electronic functions. However, it was recognized early on that the coordination of electronic control units (ECUs) could enhance vehicle functionality immensely. Data exchange between the electronic control units was initially implemented conventionally, i.e. a physical communication channel was allocated to every signal to be transmitted.
Serial communication
However, intensive wiring effort enabled just limited data exchange. The only solution that seemed to offer a way out of this dilemma came from serial bit exchange of data via a single communication channel (bus). This led to the need to conceptualize a serial communication system tailored to the requirements of the automobile.
Secure data transfer with CAN
At the beginning of the 1980s, Bosch began to develop such a serial communication system. It was given the name CAN (Controller Area Network). Even today, CAN is still performing useful services in motor vehicles in networking ECUs in the powertrain, chassis and convenience areas. Above all, CAN is characterized by very reliable data transmission that satisfies the real-time requirements of target usage areas.
Simplification
Since the introduction of CAN, complex wire harnesses in the automobile - often with many variants - have become a thing of the past. Not only does CAN simplify project planning and installation, it also reduces wiring weight and space requirements.
Last modified: Wednesday, 22 September 2021, 2:54 PM