- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Bitwise Arbitration
Completion requirements
Bus Access Methods
The central component of the CSMA bus access method defined by ISO 11898-1 is bit-by-bit arbitration. Despite simultaneous bus access, it prevents or resolves the occurrence of collisions. This means that only one frame survives the arbitration undamaged. Both terms CSMA/CR (Collision Resolution) and CSMA/CA (Collision Avoidance) can be found in the literature. These show the views of the winner (CSMA/CA) and losers (CSMA/CR) of the arbitration.
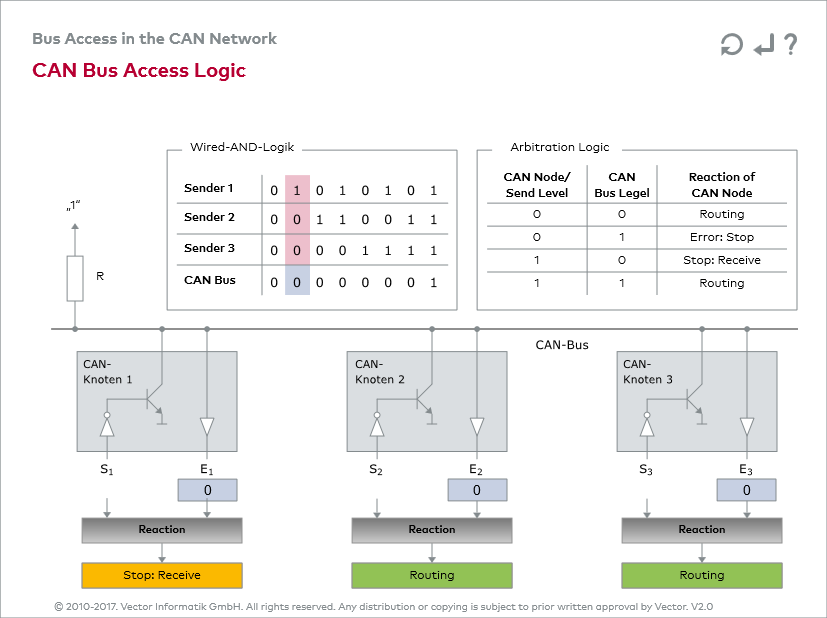
Unique bus level
After network-wide synchronization, all CAN nodes wishing to send place their identifier of the CAN message bitwise onto the CAN bus, from most significant to least significant bit. In this process, the wired-AND bus logic upon which the CAN network is based ensures that a clear and distinct bus level results on the bus.
Arbitration logic
Finally, the arbitration logic decides whether a CAN node may continue to send, or whether it must stop sending. The interactive figure “Bus Access Logic” helps you to become more familiar with the mechanisms underlying bitwise bus arbitration.
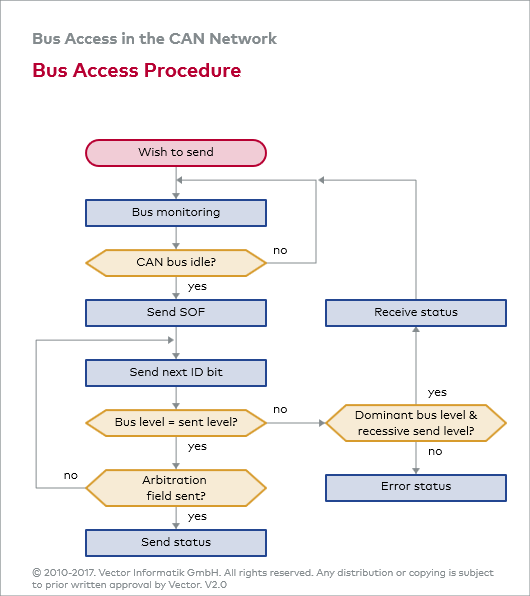
One sender at a time
At the end of the arbitration phase, the CAN node transmitting the CAN message with the lowest ID gets authorization to send. CAN nodes with lower priority messages switch to the receiving state, later they access the CAN bus for another sending attempt as soon as it is available again. The figure “Bus Access Procedure” depicts all actions of a CAN node in the context of bus access.
Last modified: Friday, 29 July 2022, 10:45 AM