- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Frame Types
Completion requirements
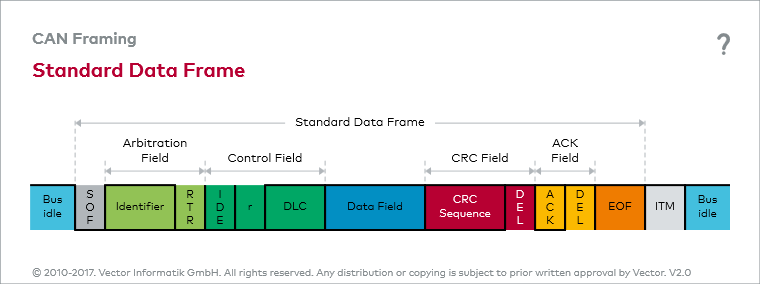
Data frame
For transmitting user data, ISO 11898-1 prescribes the so-called data frame. A data frame can transport a maximum payload of eight bytes. For that there is the so-called data field, which is framed by many other fields that are required to execute the CAN communication protocol. They include the message address (identifier or ID), data length code (DLC), checksum (cyclic redundancy check sequence — CRC sequence) and RX acknowledgement located in the acknowledgement field.
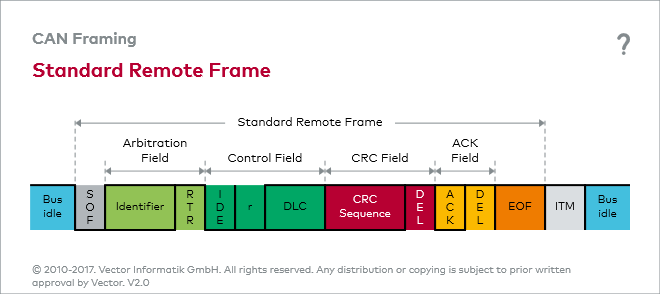
Remote frame
While the generator ECU of relevant information takes the initiative in sending data frames, there also is the remote frame — a frame type with which user data, i.e. data frames, can be requested from any other CAN node. Except for its missing data field, a remote frame has the same structure as a data frame.
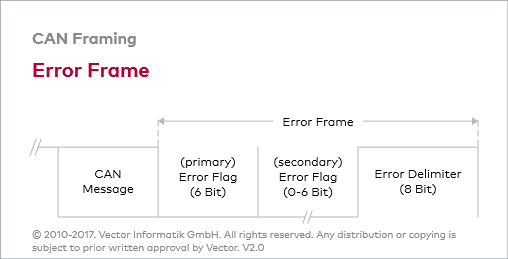
Error frame
The error frame is available to indicate errors detected during communication. An ongoing erroneous data transmission is terminated and an error frame is issued. The layout of an error frame differs significantly from the structure of the terminated erroneous data or remote frame. It consists of just two parts: The error flag and the error delimiter.
Last modified: Wednesday, 22 September 2021, 3:39 PM