- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Principle of Data Protection
Completion requirements
Data integrity in motor vehicles
Reliable data transmission is a prerequisite for the safety and reliability of electronic systems in motor vehicles. Therefore, CAN not only has to satisfy strict real time requirements, but must always provide for reliable data transmission. Because CAN is also used in very time and safety critical applications within the motor vehicle, requirements for data integrity are extremely high.
Electromagnetic compatibility (EMC)
Of fundamental importance in evaluating the data integrity are the environment, which has an interfering effect on data transmission, and the ability of the serial bus system to defend against interference. Therefore, assurance of reliable data transmission already begins with the physical system layout, where electromagnetic compatibility (EMC) traditionally plays a significant role.
Potential error sources
Despite electromagnetically compatible design and physical data protection, electrically conducted, inductive and capacitive coupling may occur, which can attenuate and distort signals. When one also considers the various sampling time points, differences in switching thresholds and frequency deviations between the communication partners — it is impossible to assume fault-free data transmission.
Minimize residual error probability
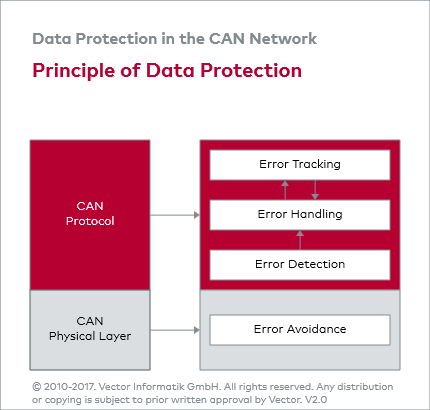
Data integrity can be viewed as the product of the probability with which the data is disturbed and corrupted during transmission and the probability that disturbed data remains undetected. This yields two basic strategies for minimizing the probability of residual errors or enhancing data integrity.
On the one hand, corruption of data can be avoided by laying out the network in an electromagnetically compatible fashion or by taking physical actions. On the other hand, corrupted data can be detected and corrected by effective logical error detection and effective logical error handling. The figure “Principle of Data Protection in the CAN Network” offers an overview of this.
Last modified: Wednesday, 22 September 2021, 4:03 PM