- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
NRZ Coding
Completion requirements
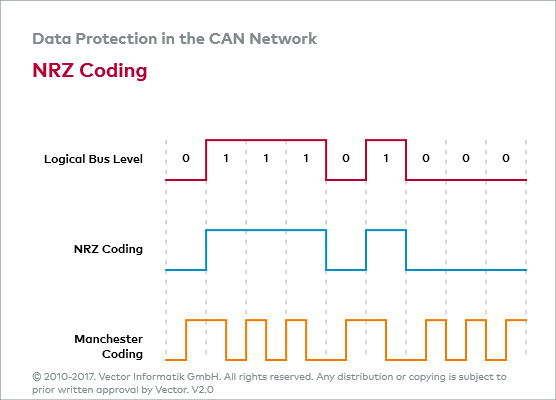
Bit coding
Working on avoiding faults means working on noise emissions and susceptibility or immunity. Of great significance to radiated emissions is bit coding. Intelligently designed bit coding helps to reduce emissions significantly. Nonetheless, this requirement must often be harmonized with a required transport capacity.
NRZ bit coding
NRZ bit coding (NRZ: Non Return to Zero) was chosen for CAN. This means that the binary signals to be transmitted are mapped directly: a logic “1” to a high level, a logic “0” to a low level. Characteristic of NRZ coding is that consecutive bits of the same polarity exhibit no level changes.
Missing synchronization
This is how NRZ coding enables very high data rates yet keeps emissions within limits. However, NRZ coding is not self-clocking; that is, it does not have any synchronization properties. If no level change occurs over a longer period of time, the receiver loses synchronization. That is why the use of NRZ coding requires an explicit synchronization mechanism, which however reduces transmission efficiency.
Bit stuffing for
synchronization
With CAN what is known as the bit stuffing method is used as the synchronization mechanism: after five homogeneous bits the sender inserts a complementary bit in the bit stream (Manchester coding, for example, does without such a mechanism, since it is self-clocking).
Last modified: Wednesday, 22 September 2021, 4:04 PM