- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
CAN Transceiver
Completion requirements
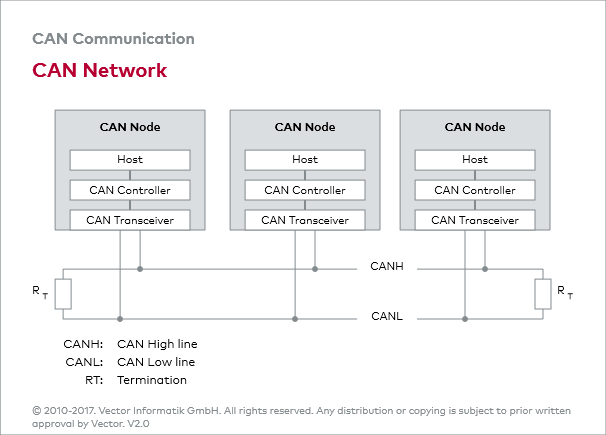
Bus connection
Previously, the CAN controller was frequently connected to the communication media (CAN bus) by a discrete circuit. Today, however, CAN transceivers handle the bus connection. A CAN transceiver always has two bus pins: one for the CAN high line (CANH) and one for the CAN low line (CANL). This is because physical signal transmission in a CAN network is symmetrical to achieve electromagnetic compatibility, and the physical transmission medium in a CAN network consists of two lines.
High / Low Speed
Typically, a distinction is made between high-speed CAN transceivers and low-speed CAN transceivers. High-speed CAN transceivers support data rates up to 1 Mbit/s. Low-speed CAN transceivers only support data rates up to 125 kbit/s. However, low-speed CAN transceivers ensure a fault-tolerant layout of the bus interface (e.g. a failure of one of the two communication lines does not result in total communication failure).
Transceiver layout
The figure “CAN Transceiver Layout” shows the basic layout of a high-speed CAN transceiver. When both output transistors are blocking, both CAN lines assume the same potential (0.5*Vcc), and the differential voltage is zero. As soon as both transistors conduct, this produces a differential voltage between the two lines that is a function of the load resistance. According to ISO 11898-2 this difference should be 2 Volt. Accordingly, a current of approx. 35 mA flows.
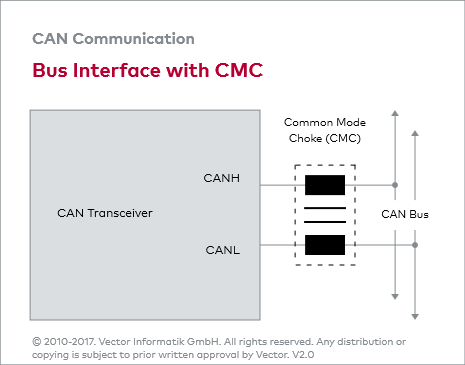
Noise immunity
In general, CAN transceivers are characterized by very low electromagnetic emissions and a wide common mode operating range for high noise immunity. In addition, today's CAN transceivers offer ESD protection up to 8 kV. Despite its high common mode rejection in very critical use areas, a Common Mode Choke (CMC) inserted near the output can help to further reduce emissions.
Limitations
The maximum number of CAN nodes is specified as 32 in ISO 11898. In practice, the maximum number of CAN nodes largely depends on the performance of the CAN transceivers used and whether it is a high-speed or low-speed CAN network. For example, if the TJA1050 high-speed CAN transceiver is used in a high-speed CAN network, up to 110 CAN nodes may be connected in one CAN network per specification.
![]()
Last modified: Wednesday, 22 September 2021, 3:25 PM