- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Prioritization
Completion requirements
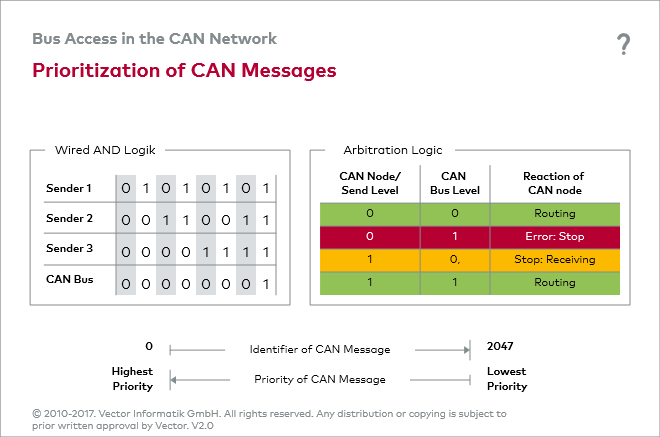
Priority and Identifier
The priorities of the CAN messages are decisive in obtaining bus access in the CAN network. They are encoded via the identifier which is transmitted bitwise from the most significant to the least significant bit.
Smaller identifier = higher priority
Wired-AND bus logic and arbitration logic ensure that the priority of the CAN message increases with decreasing identifier value: The smaller an identifier is, the higher the priority of the CAN message. The figure “Prioritization” explains this relationship.
Busload and
real-time-behavior
If the bus load is not too high, this type of random, nondestructive and priority-controlled bus access provides for fair and very quick bus access.
Nonetheless, it must be taken into account that increasing bus load primarily causes delays in lower-priority CAN messages to grow. This could impair the real-time capability of the CAN communication system. Therefore, in designing the system the priorities of CAN messages should be derived from the urgency of the signals they will transport.
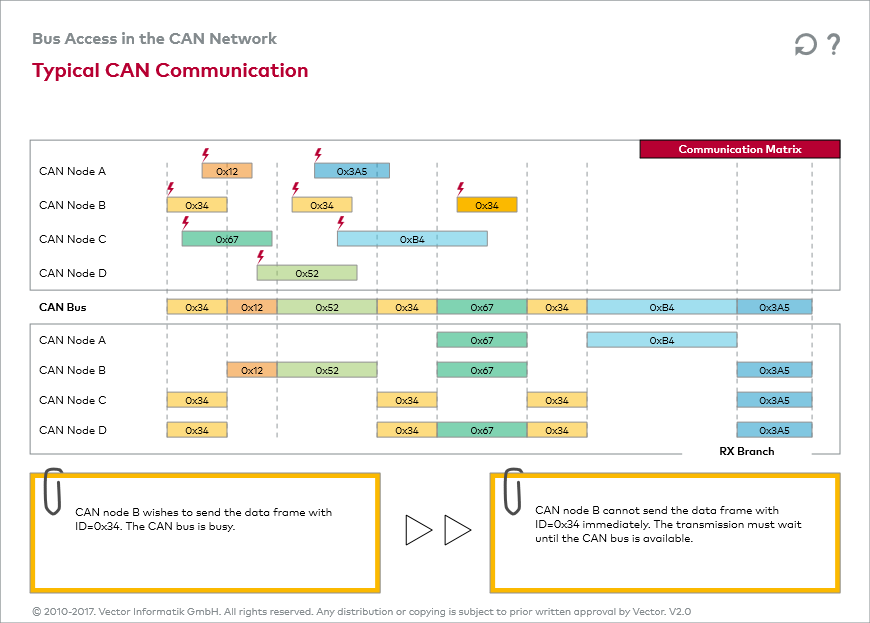
Typical CAN communication
The interactive figure “Typical CAN Communication” helps you to gain an understanding of the communication flow in a CAN network. It is based on the communication relationships listed in a communication matrix and events that occur at different points of time.
Knowledge reinforcement
The exercise “Bus Access in the CAN Network” lets you test your knowledge. This exercise asks you to develop the message sequence resulting from an arbitrary constellation of data frames and events on the CAN bus.
Last modified: Wednesday, 22 September 2021, 3:59 PM