- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
Indicating too many Errors
Completion requirements
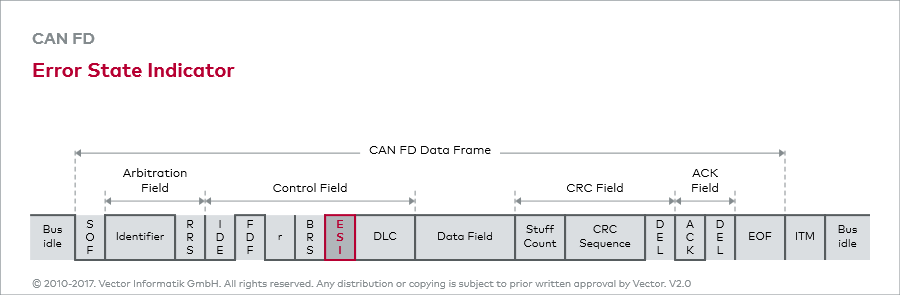
Error State Indicator
A bit called Error State Indicator (ESI) follows the Bit Rate Switch (BSR). It is dominant, if the ECU is in the Error Active state. If it is recessive it indicates that the ECU is in the state Error Passive.
The purpose of this bit is to enable a more transparent way of tracking errors, as well as a simpler network management. The states Error Active and Error Passive of the network nodes are communicated on the entire network.
Last modified: Wednesday, 22 September 2021, 4:20 PM