- Overview
- 1. Introduction
- 2. CAN Communication
- 3. CAN Framing
- 4. CAN Bus Access
- 5. CAN Data Protection
-
6. CAN FD
- Motivation
- Advantages and Consequences
- New Types of Frames
- Details of a CAN FD Frame
- Distinguishing CAN from CAN FD Frames
- Compatibility of CAN and CAN FD Controllers
- Accelerated Transmission
- Indicating too many Errors
- Length of the Data Field
- More Data with the same Security
- Changed Rules for Bit Stuffing and CRC Calculation
Introduction to CAN
CAN Controller
Completion requirements
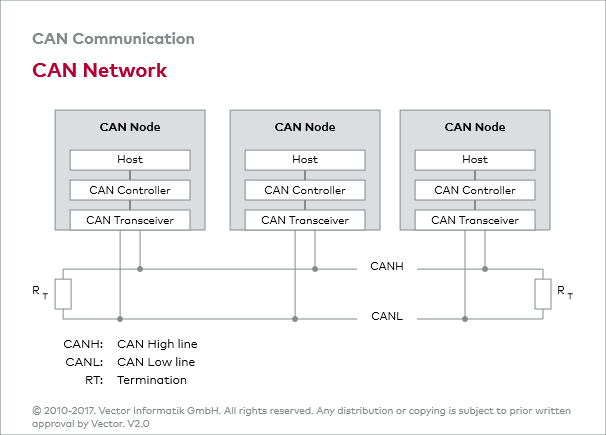
CAN interface
An electronic control unit (ECU) that wants to participate in CAN communication requires a CAN interface. This comprises a CAN controller and a CAN transceiver. The CAN controller fulfills communication functions prescribed by the CAN protocol, which relieves the host considerably.
CAN transceiver
The CAN transceiver connects the CAN controller to the physical transmission medium. Usually, the two components are electrically isolated by optical or magnetic decoupling, so that although overvoltages on the CAN bus may destroy the CAN transceiver, the CAN controller and the underlying host are preserved.
Send / Receive
In a CAN network, the CAN nodes differ in the number of CAN messages they each send or receive. There are also great differences in the frequencies of sending and receiving. For example, one CAN node might receive five different CAN messages, each at a cycle of ten milliseconds, while another CAN node just needs to receive one CAN message every 100 milliseconds. These obvious differences have resulted in two fundamental CAN controller architectures: CAN controllers with and without object storage.
Integration
Regardless of the CAN controller type, CAN controllers may be integrated, or they may — as shown in the diagram — be used as a stand-alone chip component. In this case, the microcontroller treats the CAN controller like a memory chip. The stand-alone variant is more flexible, but the on-chip variant has the advantage of requiring less space, and communication between the microcontroller and the CAN controller is faster and more reliable.
Last modified: Wednesday, 22 September 2021, 3:02 PM