Introduction to CAN
标准化
完成条件
CAN协议(CAN protocol)
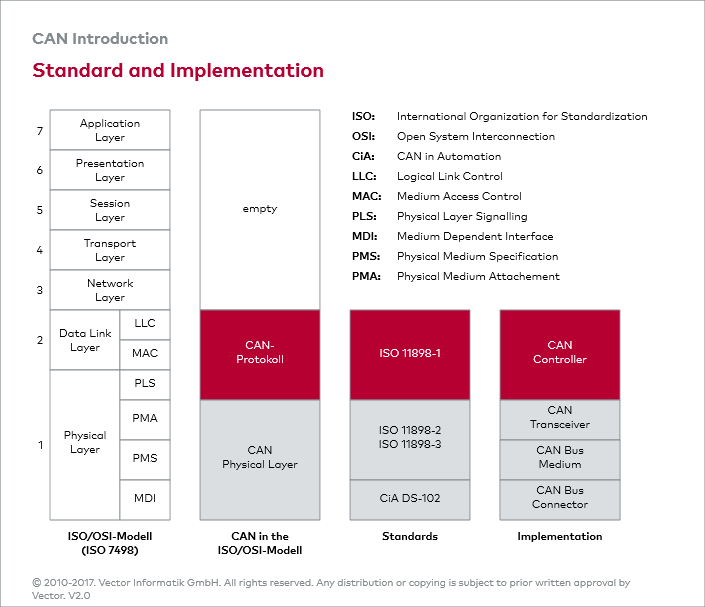
从1994年开始,ISO启动CAN技术标准化工作,并最终形成4份标准规范。其中,ISO 11898-1描述了CAN协议。除了数据通信的参考模型,CAN协议仅包括数据链路层(介质访问控制子层MAC -Medium Access Control和逻辑链路控制子层LLC - Logical Link Control)和物理层(物理信号PLS - Physical Signaling)。
CAN控制器(CAN Controller)
CAN协议是基于硬件实现的。目前有多种不同的CAN控制器,其唯一区别在于对CAN报文的处理方式,具体体现在对象层中:具有对象存储的CAN控制器(即完整CAN控制器-Full CAN Controller)与不具有对象存储的CAN控制器(即基础CAN控制器-Basic CAN Controller)。
高速CAN(CAN High Speed)和低速CAN(CAN Low Speed)
ISO 11898-2和ISO 11898-3介绍了数据通信参考模型的两个子层:PMA(Physical Medium Attachment,物理介质适配层)和PMS(Physical Medium Specification,物理介质规范)。它们描述了两种不同的CAN物理层:高速CAN物理层和低速CAN物理层,主要区别在于对总线电平和数据传输速率(波特率)的定义。
波特率
ISO 11898-3规定最大的波特率为125 kbit/s,主要用于汽车的舒适系统领域。ISO 11898-2规定最大波特率为1 Mbit/s,主要用于汽车的动力系统和底盘系统领域。
物理层的MDI(Medium Dependent Interface,介质相关接口)子层不存在任何标准。CiA DS-102(CiA:CAN in Automation)仅推荐使用特定的连接器(SUB-D9),并遵循特定的连接器引脚分配。
事件驱动通信
ISO 11898-1定义了事件驱动通信。总线负载较高可能会导致延迟,对于优先级较低的CAN报文来说尤其如此。若要确保在CAN网络中实现确定性通信,可以使用ISO 11898-4。ISO 11898-4是数据链路层的扩展,为CAN网络增加了时间触发的通信选项。
ISO/OSI参考模型
图“Standard and Implementation”显示了数据通信的ISO/OSI参考模型、CAN技术规范(CAN standard)及其实现之间的关系。
最后修改: 2023年05月16日 星期二 09:45