Introduction to CAN
CAN控制器
完成条件
CAN接口
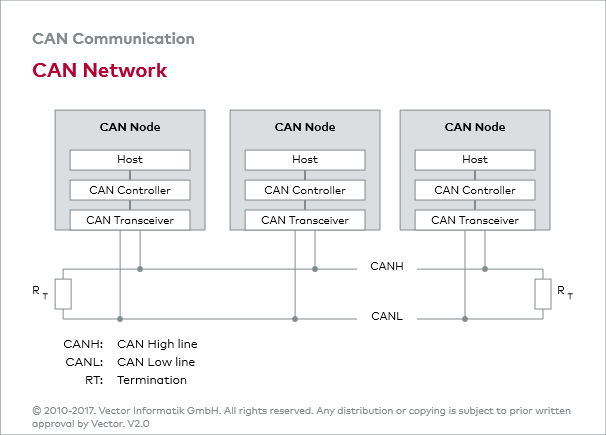
ECU需要CAN接口才能参与CAN通信。CAN接口由CAN控制器和CAN收发器组成。CAN控制器执行CAN协议规定的通信功能,从而大大减轻了主机的负担。
CAN收发器
CAN收发器将CAN控制器连接到物理传输介质。通常,控制器和收发器之间采用光耦隔离或磁耦隔离,因此尽管CAN总线上的过电压可能会损坏CAN收发器,但CAN控制器和底层主机仍可受到保护。
发送/接收
在CAN网络中,CAN节点的不同之处在于每个节点发送或接收的CAN报文的数量。发送和接收的频率也存在很大差异。例如,一个CAN节点可能要接收五条不同的CAN报文,且每隔10毫秒接收一条,而另一个CAN节点只需每隔100毫秒接收一条CAN报文。这些明显的差异导致产生了两种基本的CAN控制器架构:完整CAN控制器和基础CAN控制器。
集成
不论CAN控制器类型如何,CAN控制器都可集成在微控制器中,也可以作为独立的芯片存在(如图所示)。在这种情况下,微控制器会将CAN控制器视为存储芯片。虽然独立CAN控制器更加灵活,但集成CAN控制器具有所需空间更少的优势,并且微控制器和CAN控制器之间的通信更快、更可靠。
最后修改: 2021年01月18日 星期一 14:59