Introduction to CAN
推动因素
完成条件
信号数量大量增加
引入CAN总线的数十年中,汽车嵌入式系统的结构发生了深远的变化,最明显的变化是数量:如果在引入CAN时只需传输数百个信号,那么今天这个数字已达到五位数。
新要求,新总线系统
数据流量的增加导致CAN总线上的总线负载率越来越高。除了对带宽的需求在不断增加,对确定性系统行为的需求也在不断增长,这刺激了新总线系统的开发。因此,出于信息娱乐目的,开发了带宽高达150 Mbit/s的MOST总线。确定性FlexRay总线可提供10Mbit/s的带宽,用于驾驶员辅助功能。在带宽范围的低端,引入了LIN作为低成本解决方案,用于完成传感器-执行器-区域中的任务。这些新的总线系统覆盖了各个领域,但CAN仍然是主流的汽车总线系统。
CAN不会被取代
只有极少数的CAN需要替换为传输速率更快的总线,例如FlexRay。但没有替换的主要原因是硬件成本较高以及将系统转化为新技术的开发工作巨大。
使用更多路CAN总线通常可以规避CAN带宽不足,但这需要网关在总线之间传输数据。
CAN性能限制
CAN带宽的限制因素源于自身的一个核心属性:在报文传输的特定阶段,多个网络节点可能同时处于传输模式。仲裁阶段传输开始时可能就是这种情况,并且在报文末尾的应答场中也是始终如此。这意味着一个位的传输时间不得短于其电压电平从总线一端的节点传播到另一端的节点再返回所需的时间。例如:在长度为40米的CAN总线上,若要满足一个位所需的传输时间,最大传输速率应约为1 Mbit/s。
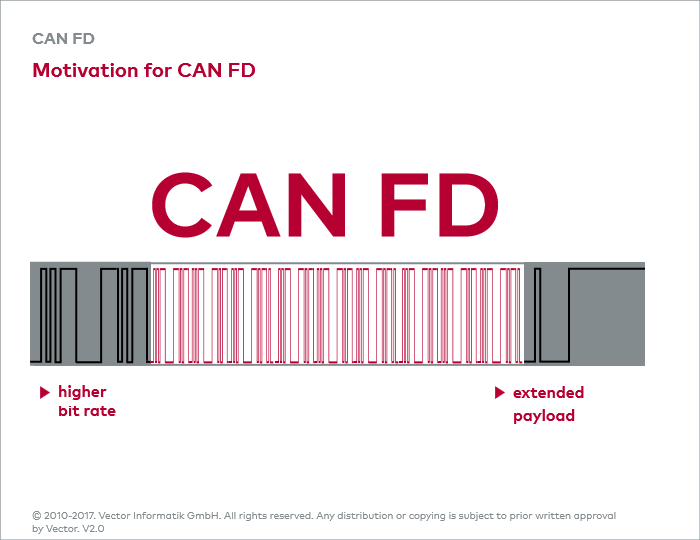
更短的位时间也能满足
但在CAN报文仲裁阶段和应答场之间,仅允许一个发送节点。因此,这一部分对位时间的最小持续时间没有限制。那么在博世的工程师看来,如果在CAN报文这一部分提高传输速率会怎样?只需在两个不同的传输速率之间切换:在CAN报文的开头和末尾切换为慢速,在中间切换为快速。这就是CAN FD的基本概念。
![]()
最后修改: 2021年01月19日 星期二 19:20