Introduction to CAN
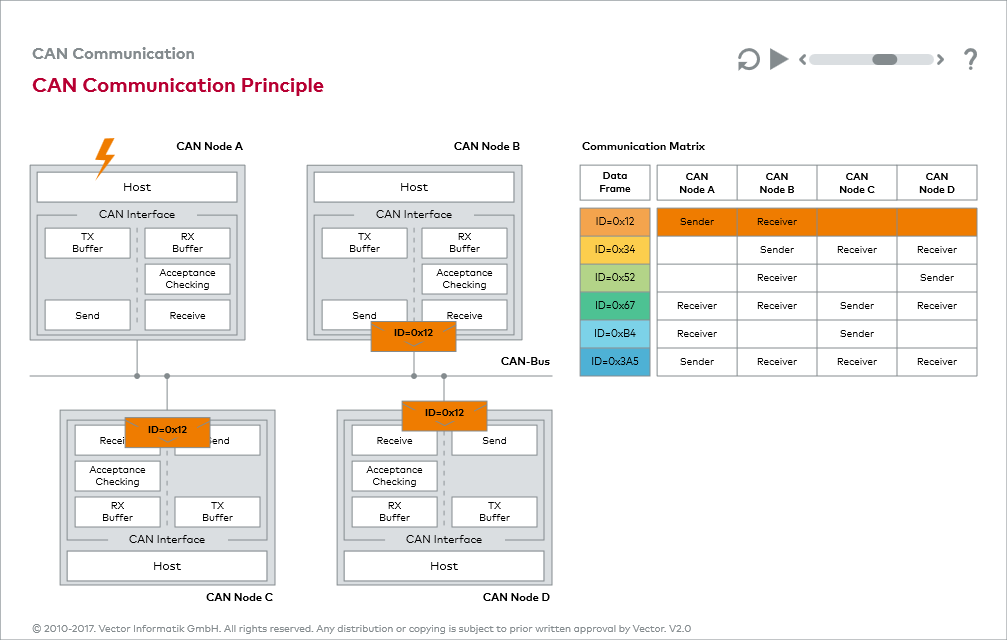
通信原理
完成条件
分散化
安全性关键应用(例如动力系统领域的应用)对通信系统的可用性提出了严格的要求。因此,让单个总线节点承担总线分配责任会造成不利影响。该总线节点易受攻击,且如果出现故障,将导致所有通信失败。最佳解决方案是分散总线访问权限,以便每个总线节点都能够访问总线。
事件驱动
CAN网络基于多主架构与总线型拓扑的原因是:每个CAN节点都可以发送报文至CAN总线上。CAN报文的传输不遵循任何预定的时间顺序,而是由事件驱动。
当传输信息时,通信通道才会处于繁忙状态,因此CAN节点可以非常快速地访问总线。理论上,由于可以快速响应异步事件且波特率高达1 Mbit/s,因此在CAN网络中完全可以实现毫秒级的实时数据传输。
接收方(receiver)选择寻址(addressing)
在CAN网络中,接收方选择寻址防止总线节点之间产生依赖,从而提高配置的灵活性:CAN报文是广播发送的,网络中所有CAN节点都可以接收到所有CAN报文。每个节点中都有过滤器,可以通过报文的标识符(ID)来筛选实际所需的CAN报文。虽然这会增加开销,但却可以在不修改CAN网络的情况下集成其他CAN节点。
CAN通信
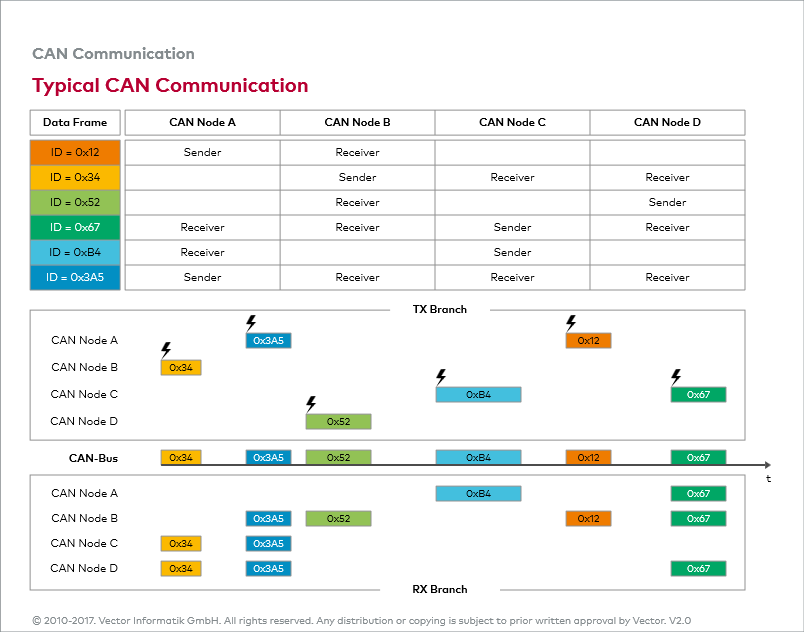
通过“CAN Communication Principle”动画可以了解如何在CAN网络中进行报文传输,以及如何使用CAN通信矩阵和接收过滤器。请阅读说明,以便充分利用动画中的全部功能。 “Typical CAN Communication”图显示了典型的通信顺序,包括构成CAN网络基础的通信矩阵,以及最终的接收和发送情况。
最后修改: 2021年01月19日 星期二 15:25