Steer-by-Wire
Mechanische Lenkung
Die Lenksysteme heutiger Kraftfahrzeuge werden abhängig von den
erforderlichen Lenkkräften mit hydraulischen, elektrohydraulischen oder
elektrischen Lenkhilfen ausgerüstet. Unabhängig von der Art der
Lenkunterstützung besitzen diese Systeme über die Lenksäule eine
mechanische Verbindung zwischen Lenkrad und gelenkten Rädern, so dass
auch bei Ausfall der Servounterstützung der mechanische Durchgriff
weiter besteht.
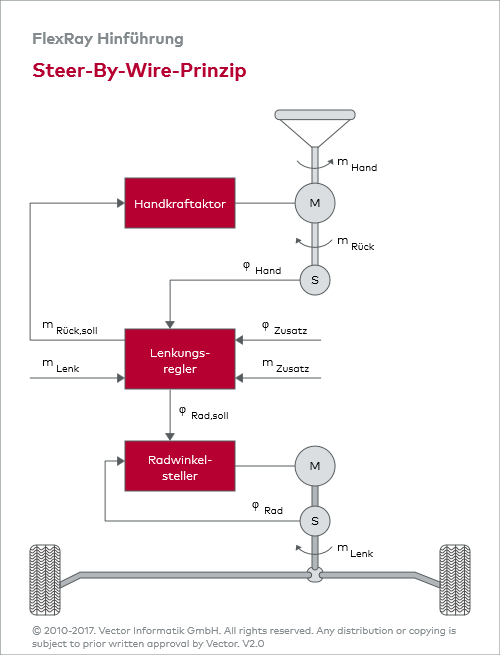
Elektrische Lenkung
Beim in der Grafik dargestellten elektrischen
Lenksystem wird der Lenkeingriff des Autofahrers über eine Steuerleitung
von einem Steuergerät entgegengenommen, verarbeitet und wieder über
eine Steuerleitung als Stellbefehl an den Aktor übertragen und dort in
eine Bewegung umgesetzt. An die Stelle der mechanischen Kopplung treten
ein Aktor zur Positionierung der Räder (Radwinkelsteller) sowie ein
Motor zur Simulation der Rückstellkräfte am Lenkrad (Handkraftaktor).
Die Koordination zwischen Handkraftaktor und Radwinkelsteller übernimmt
der Lenkungsregler. Die Lenksäule wird quasi durch
Kommunikationsleitungen ersetzt, der Fahrer lenkt „by wire“.
Steer-by-Wire
Neben
der Realisierung einer variablen Lenkunterstützung und Lenkübersetzung,
die Möglichkeit einer individuellen Einstellung der Lenkcharakteristik
steckt das größte Potenzial einer solchen Lenkung nach dem Steer-by-Wire-Prinzip
in der Einbeziehung der Lenkung in die Fahrdynamikregelung um die
aktive Sicherheit erhöhen zu können. Als konsequente Erweiterung des
heutigen ESP eröffnet ESP II durch aktive Lenkregelfunktionen neue
Dimensionen der Fahrdynamik und Fahrstabilität.
Weil der Ausfall
der Lenkung den Verlust der Kontrolle über das Fahrzeug bedeutet, zählt
die Lenkung ohnehin schon zu den sicherheitskritischsten Systemen im
Kfz. Durch den Verzicht auf die mechanische Rückfallebene
beim Lenksystem wird die Diskussion um die Zuverlässigkeit
sicherheitskritischer, elektronischer Systeme im Kfz noch intensiver.
Auf dem Weg zum Steer-by-Wire-System ist noch eine Reihe von komplexen
Aufgaben, vor allem bezüglich der Fehlertoleranz, zu lösen.