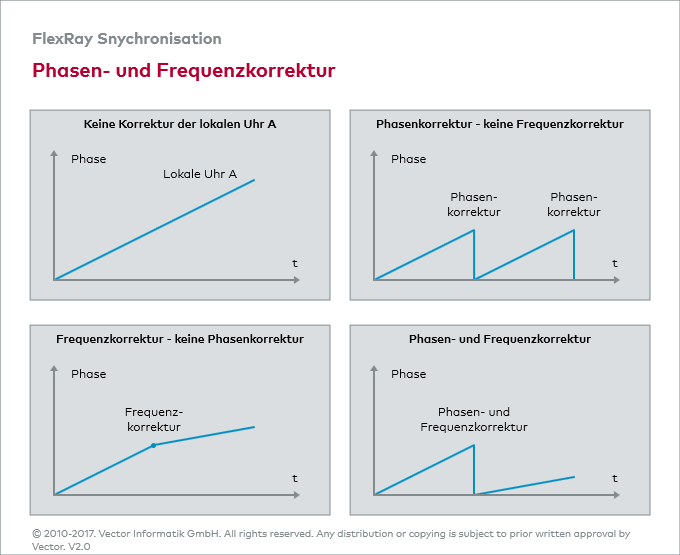
Phasen- und Frequenzkorrektur
Die Phasenkorrektur sorgt dafür, dass die lokalen Uhren
der FlexRay Knoten dieselbe Phase besitzen und so die
Kommunikationszyklen stets zeitgleich beginnen. Ohne weitere
Korrekturmaßnahmen muss bei der Systemauslegung stets die maximale
Abweichung der lokalen Takte zugrunde gelegt werden.
Dies hieße,
bei einer maximalen Abweichung zweier lokaler Uhren von 3000 ppm und
einer Zyklusdauer von beispielsweise 10 Millisekunden kämen am Ende des
Zyklus 30 Mikrosekunden Drift zusammen, was die maximal mögliche
Datenrate erheblich reduzieren würde.
Eine Verbesserung der
Bandbreiteneffizienz zeitgesteuerter Kommunikationssysteme erreicht man
durch den zusätzlichen Einsatz der Frequenzkorrektur.
Während die Phasenkorrektur lediglich die Symptome der
Frequenzabweichung behandelt, setzt die Frequenzkorrektur an der Ursache
für die Frequenzabweichung an.
Dies ist allerdings gar nicht so
einfach, weil die Frequenz eines Quarzes nicht direkt beeinflusst
werden kann. Deswegen kommt ein Frequenzteiler ins Spiel, der die
Quarzfrequenz in die lokale Zeitbasis des FlexRay Knotens umsetzt. Durch
die Änderung des Teilverhältnisses können die lokalen Uhren
beschleunigt oder gebremst werden, so dass schließlich die
Kommunikationszyklen für alle FlexRay Knoten gleich lang sind.
Weil
durch die Frequenzkorrektur alle lokalen Uhren nahezu mit der gleichen
Geschwindigkeit laufen, bleiben trotz transienter Störungen der, zur
Synchronisation erforderlichen, Synchronisationsbotschaften über mehrere
Kommunikationszyklen hinweg, die Abweichungen der lokalen Uhren
innerhalb definierbarer Grenzen. Der Einsatz der Frequenzkorrektur macht
die Uhrensynchronisation in einem FlexRay Cluster äußerst robust
gegenüber transienter Störungen. Der Ausfall der Uhrensynchronisation
kann über mehrere Kommunikationszyklen hinweg toleriert werden.