CAN 개발 동기
전화(電化)
근래의 자동차 역사는 고도의 전자화라는 특징을 갖습니다. 이는 고객들이 점차 현대적인 자동차를 추구함에 따라 이루어졌으며, 배기가스 배출 관련 법안이 더욱 엄격해지는 추세도 하나의 요인입니다. 또한, 세계화 역시 하나의 이유로서 경쟁의 심화와 비용 압박은 지속적인 혁신에 대한 압력으로 이어졌습니다.
데이터 전송
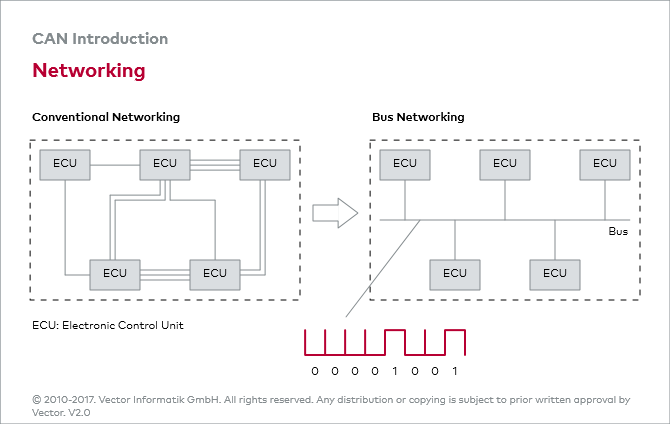
초기에는 독립적으로 운영되는 전자 ECU로 전자 기능을 충분히 구현해냈습니다. 그러나 ECU의 조직화가 차량의 기능성을 매우 크게 향상시킬 수 있다는 점이 인식되었습니다. 초기 ECU 간의 정보 교환은 기존의 방식, 예를 들어 전송되는 모든 신호에 물리적 통신 채널이 할당되는 방식으로 이루어졌습니다.
직렬 통신
그러나 배선에 대한 집중적인 노력에도 불구하고 데이터의 교환은 제한적이었습니다. 이 딜레마에서 벗어날 수 있는 유일한 해결책은 단일 통신 채널(버스)을 통한 데이터의 직렬 비트 교환(serial bit exchange)에 있는 듯했고, 따라서 자동차에 적합한 직렬 통신 시스템(serial communication system)을 개념화할 필요성이 제기되었습니다.
CAN을 이용한 데이터 전송 보호
1980년대 초반, 보쉬(Bosch)는 그러한 직렬 통신 시스템을 개발하기 시작했습니다. 이 시스템은 CAN(Controller Area Network)이라고 불립니다. 오늘날에도 CAN은 자동차 파워트레인, 섀시 및 편의 장치의 ECU를 네트워킹하는 데에 유용한 서비스를 제공합니다. 무엇보다, CAN은 목표한 사용 구역의 실시간 조건을 만족하는 매우 안정적인 데이터 전송 능력을 갖추고 있습니다.
단순화
CAN의 도입 이후, 자동차의 복잡한 와이어링 하네스와 그것의 베리언트는 더 이상 사용하지 않게 되었습니다. CAN은 프로젝트의 계획과 설치를 단순화할 뿐만 아니라, 와이어의 하중과 차지하는 공간을 감소시킵니다.