CAN 소개
CAN 버스 논리
완료 조건
우성/열성
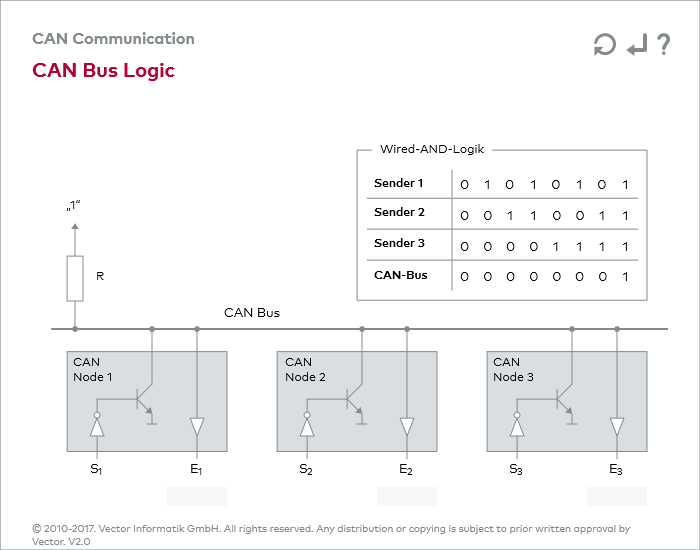
(특히 버스 접근, 고장 표시와 인식에서) 막힘 없는 통신을 위한 기본적인 전제 조건은 우성 및 열성 버스 레벨이 뚜렷이 구분되어야 한다는 점입니다. 우성 버스 레벨(dominant bus level)은 논리 값 “0”에, 열성 버스 레벨(recessive bus level)은 논리 값 “1”에 연결되어야 합니다.
우성 버스 레벨은 열성 버스 레벨을 덮어씁니다. 다른 CAN 노드가 동시에 우성 및 열성 버스 레벨을 송신한다면 CAN 버스는 우성 버스 레벨을 선택합니다. 열성 버스 레벨은 다른 모든 CAN 노드가 열성 레벨을 송신할 때에만 발생합니다.
AND-논리
이것이 바로 AND-논리(AND- Logic)입니다. 물리적으로, AND-논리는 오픈 콜렉터 회로(open collector circuit)라고 불리는 회로에서 실행됩니다. 그림 “버스 논리”로 CAN 네트워크의 기초인 배선 AND 버스 논리를 학습하세요.
마지막 수정됨: 목요일, 22 8월 2019, 8:14 AM