CAN 소개
표준화
완료 조건
CAN 프로토콜
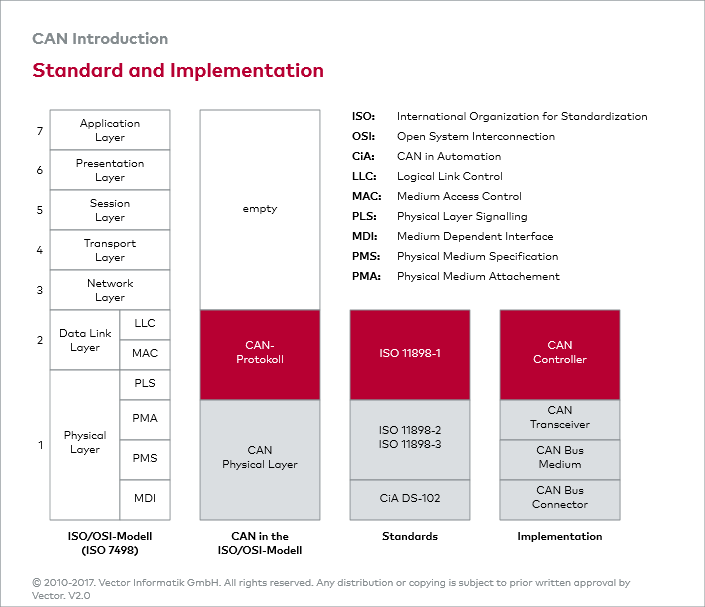
CAN 기술은 1994년 이래로 표준화되었으며, 네 개의 ISO 문서가 이에 대한 설명을 담고 있습니다. ISO 11898-1은 CAN 프로토콜을 설명합니다. 데이터 통신의 참조 모델과 관련하여 CAN 프로토콜은 데이터 링크 계층(MAC - 매체 접근 제어, LLC – 논리 링크 제어)과 물리 계층(PLS – 물리적 신호)만을 다룹니다.
CAN 컨트롤러
CAN 프로토콜은 하드웨어에서 실행됩니다. 많은 종류의 CAN 컨트롤러가 만들어졌는데, 이들의 유일한 차이점은 CAN 메시지를 다루는 방식에 있으며, 이 차이는 객체 계층에서 드러납니다. 즉, (완전 CAN 컨트롤러라고 불리는) 객체 저장소를 갖춘 CAN 컨트롤러와, (기본 CAN 컨트롤러라고 불리는) 객체 저장소가 없는 CAN 컨트롤러는 서로 구별됩니다.
고속
CAN & 저속
CAN
두 ISO 문서 ISO 11898-2 및 ISO 11898-3은 데이터 통신 참조 모델의 두 하위 계층을 다룹니다. 이 두 하위 계층은 PMA(Physical Medium Attachment, 물리 매체 접속) 및 PMS(Physical Medium Specification, 물리 매체 규격)로, 두 CAN 물리 계층인 고속 CAN 물리 계층(high- speed CAN physical layer)과 저속 CAN 물리 계층(low- speed CAN physical layer)을 의미합니다. 이 두 가지는 기본적으로 전압과 데이터 전송 속도(데이터 속도)에서 차이를 보입니다.
데이터 전송률
ISO 11898-3에서는 데이터 속도를 125 kbit/s까지 허용하는데, 이는 자동차의 편의 장치에 이용됩니다. ISO 11898-2에서는 데이터 속도가 1Mbit/s까지 가능하기 때문에 파워트레인 및 섀시 부문에 이용됩니다.
물리 계층의 MDI(Medium Dependent Interface, 매체 의존 인터페이스) 하위 계층을 다루는 표준은 없습니다. CiA DS-102(CiA: 자동화 CAN)는 단지 특정한 커넥터(SUB-D9)를 사용할 것과 특정 커넥터 핀 배치를 준수할 것을 권장합니다.
이벤트 기반 통신
ISO 11898-1에서는 이벤트 기반 통신(event driven communication)을 정의합니다. 특히 저 순위 CAN 메시지의 경우 버스 하중이 많아지면 지연이 발생합니다. 이러한 상황을 방지하기 위해 ISO 11898-4를 이용할 수 있는데, 이 문서는 CAN 기반 네트워크에 타임 트리거 통신(time triggered communication)을 더하는 데이터 링크 계층의 확장을 다룹니다.
국제 표준화 기구 개방형 시스템 상호 참조 모델
그림 “표준 및 구현”은 데이터 모델의 ISO/OSI 참조 모델, CAN 표준과 구현 사이의 관계를 보여줍니다.
마지막 수정됨: 목요일, 22 8월 2019, 9:29 AM