CAN 통신 원리
분산
파워트레인와 같이 안전이 중요한 영역에는 통신 시스템의 이용성에 관한 여러 요구 사항이 제기되며, 단일 버스 노드에서 버스의 배포를 담당하는 것은 불이익을 가져옵니다. 이 버스 노드가 고장이 난다면 통신 전체가 이루어지지 않기 때문입니다. 따라서 분산형 버스 접근이 해결책으로 제시되며, 이를 통해 각 버스 노드는 버스에 접근할 수 있습니다.
이벤트 기반
이것이 바로 CAN 네트워크가 멀티마스터 아키텍처(multimaster architecture)와 라인 토폴로지(line topology)가 조합된 형태를 이용하는 이유입니다. 각각의 CAN 노드는 CAN 네트워크의 버스에 CAN 메시지를 송신할 수 있는 권한을 가지고 있습니다. CAN 메시지를 전송하는 것은 미리 정해진 시간 순서를 따르는 것이 아니며 이벤트에 기반합니다.
통신 채널은 새로운 정보가 전송되어야 할 때만 동작하며, 이는 매우 빠른 버스 접근을 가능하게 합니다. 원칙적으로 밀리세컨드(msec) 단위의 실시간 자료 전송은 CAN 네트워크에서는 아무런 문제가 없는데, 이는 비동기 이벤트에 대해 빠르게 대응할 능력과 1 Mbit/s에 달하는 매우 빠른 데이터 속도 때문입니다.
수신자 선택 주소 지정
리시버 선택적 어드레싱(Receiver-selective addressing) 방식은 버스 노드 사이의 의존성을 방지하여 설정의 유연성을 증대하기 위해 CAN 네트워크에서 이용됩니다. 각 CAN 노드가 수신(브로드캐스팅) 할 수 있도록 CAN 메시지를 이용할 수 있습니다. 이것의 전제 조건은 메시지 확인자(ID)와 노드 특정 필터링(node-specific filtering)에서 각 CAN 메시지를 인식할 수 있어야 한다는 점입니다. 이것은 CAN 네트워크를 변경할 필요 없이 추가적인 CAN 노드를 추가할 수 있게 합니다.
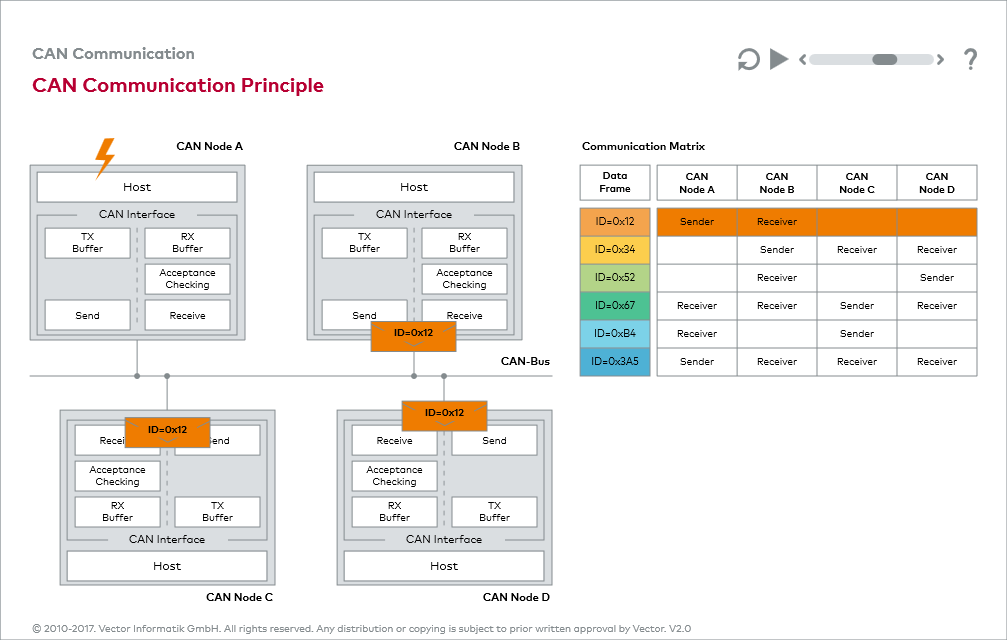
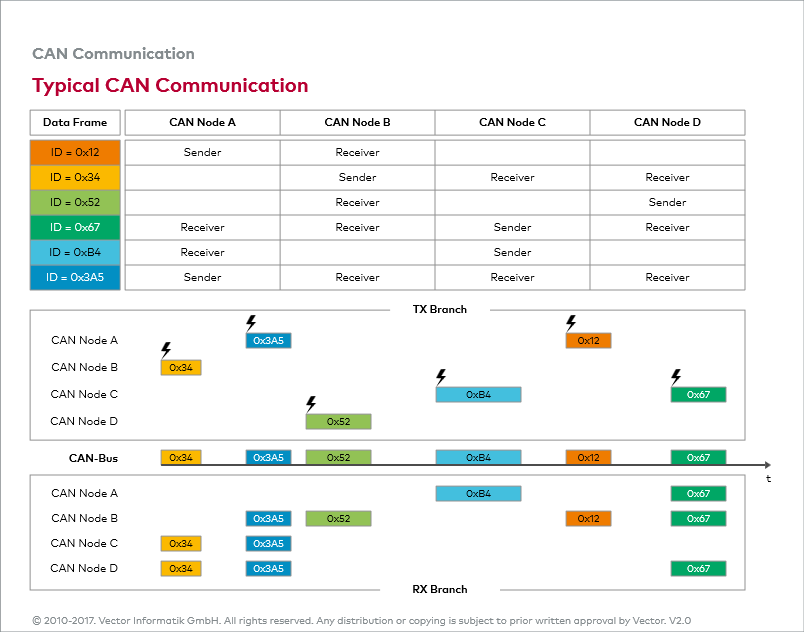
CAN에서 통신
그림 “CAN 통신 원리”를 통해 CAN 네트워크의 메시지 전송 과정을 학습하고, CAN 통신 매트릭스와 수용 필터링 사용법을 익힐 수 있습니다. CAN 네트워크의 기초를 이루고 있는 통신 매트릭스와 결과 송신 및 RX 부문을 확인할 수 있습니다.