CAN 소개
비트 버스 중재
완료 조건
CSMA/CA
ISO 11898-1이 규정하는 버스 접근 방식의 핵심 요소는 비트 버스 중재입니다. 이는 동시적인 버스 접근에도 충돌이 발생하는 것을 막습니다. 비트 버스 중재의 원리는 비교적 간단합니다.
개별 버스 레벨
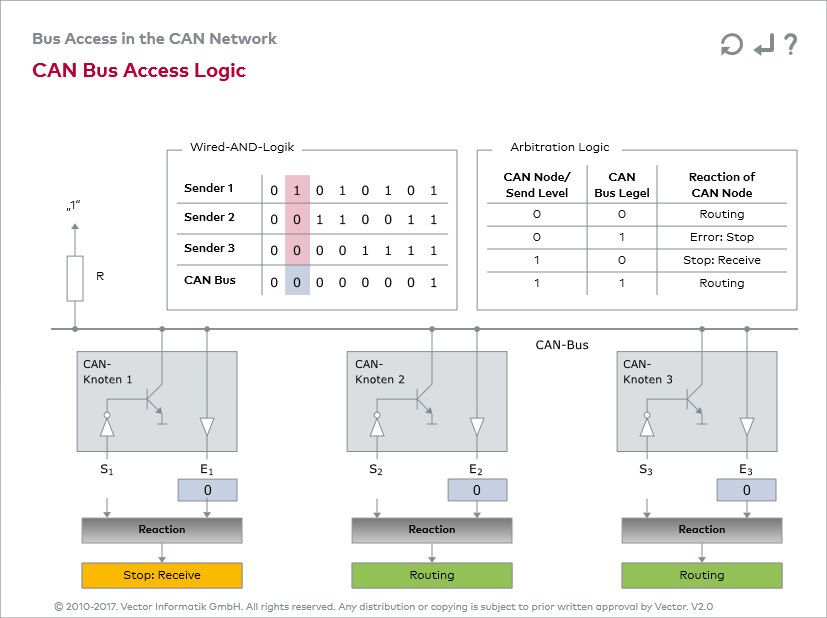
네트워크 범위의 동기화 후에, 발신하고자 하는 모든 CAN 노드는 자신의 CAN 메시지 비트 확인자를 CAN 버스에 위치시킵니다. 이는 가장 큰 비트에서 가장 작은 비트에 이릅니다. 이 과정에서 CAN 네트워크가 기초하고 있는 배선 AND 버스 논리(wired-AND Bus Logic)를 통해 뚜렷하고 명확한 버스 레벨 결과를 얻을 수 있습니다.
조정 논리
마지막으로 중재 논리(조정 논리)는 CAN 노드가 계속 발신할 것인지 또는 발신을 멈춰야 하는지를 결정합니다. 다음의 그림 “버스 접근 논리”를 통해 비트 버스 중재의 메커니즘을 더욱 깊이 있게 이해할 수 있습니다.
메시지 발신
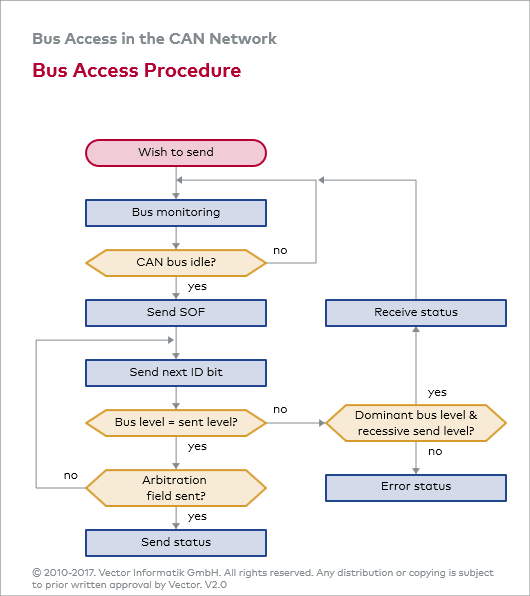
중재 단계의 마지막에, 가장 낮은 값의 ID(가장 높은 우선순위)를 가진 CAN 메시지를 보내는 CAN 노드가 발신할 수 있게 됩니다. 다른 CAN 노드들은 수신 상태로 변경되며, 이후 가능할 때에는 CAN 버스에 즉시 또 다른 발신 신호를 보냅니다. 그림 “버스 접근 절차”는 버스에 접근하는 과정에 있는 CAN 노드의 모든 행동을 나타냅니다.
지식 강화
“비트 버스 중재” 시뮬레이션을 통해 CAN 네트워크의 버스 접근에 대한 이해를 확장할 수 있습니다. 이 시뮬레이션은 발신하고자 하는 세 개의 노드로 구성됩니다. 세 개의 CAN 노드로 CAN 메시지에 대해 확인자를 설정할 수 있습니다.
마지막 수정됨: 목요일, 22 8월 2019, 9:38 AM