버스 접근의 원리
버스 접근
ISO 11898-2는 높은 이용성과 이벤트 기반(event driven)의 데이터 전송을 보장하기 위해 멀티 마스터 아키텍처(multi-master architecture)를 정의합니다. CAN 네트워크의 각 노드는 허가나 다른 CAN 노드와의 사전 조정 없이 CAN 버스에 접근할 수 있습니다. 이벤트 기반 접근의 버스 접근을 통해 이벤트에 대한 매우 빠른 반응이 가능하나, 여기에는 여러 CAN 노드가 동시에 CAN 버스에 접근하여 CAN 버스의 불필요한 중복이 발생할 잠재적인 위험이 있습니다.
충돌 방지
통신 시스템의 실시간 성능(real time capability)을 유지하기 위해 ISO 11898-1은 버스 접근에 비파괴 데이터 전송(non-destructive data transmission)을 허가합니다. CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance, 충돌 검출에 의한 반송파 회피 다중 접근)라고 불리는 방법이 여기에 사용됩니다. CSMA/CA 방식을 통해 발신하고자 하는 CAN 노드는 적절한 때에 CAN 버스에 접근할 수 있습니다.
비트 단위 버스 조정
동시적인 버스 접근의 경우, 비트 버스 중재(bit bus arbitration)에 기반한 CSMA/CA 방식은 CAN 노드 중 가장 높은 우선순위의 CAN 메시지를 선택합니다. 원칙적으로 CAN 메시지의 우선순위가 높을수록 CAN 버스에 먼저 전송됩니다. 시스템 디자인이 잘못될 경우, 낮은 우선순위의 CAN 메시지는 아예 전송되지 않을 수도 있습니다.
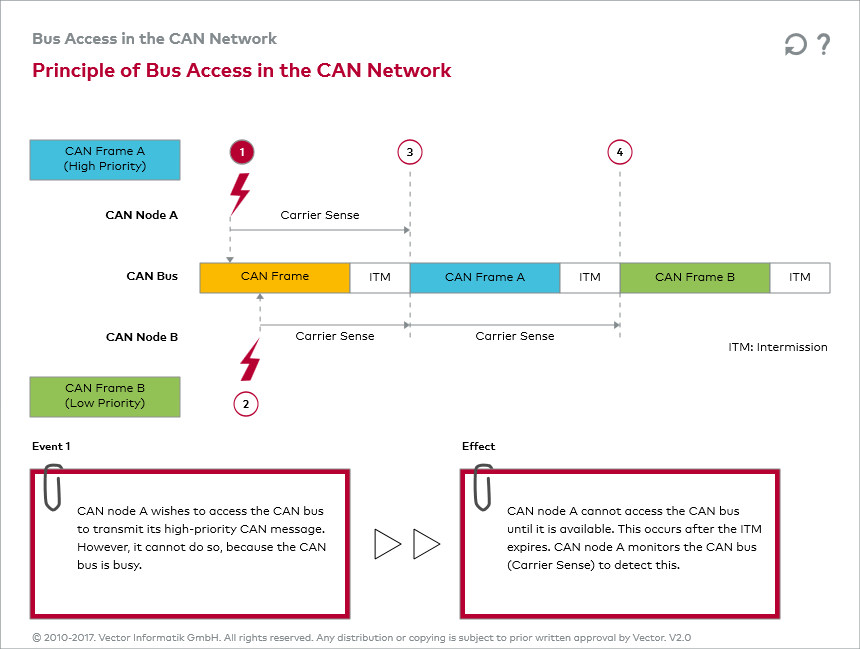
그림 “버스 접근의 원리”를 통해 위의 내용을 깊이 있게 학습할 수 있습니다. 이 그림은 두 개의 CAN 노드가 메시지 전송 도중 버스에 접근하고자 하는 상황을 다룹니다. 지시를 숙지하여 매체 객체의 전 기능성을 완전히 이해하도록 하십시오.