CAN 컨트롤러
CAN 인터페이스
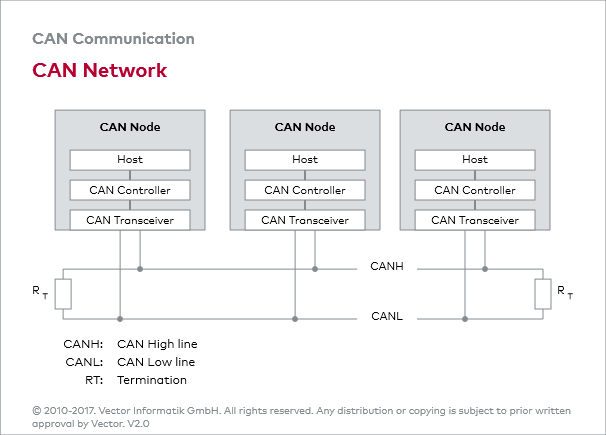
ECU가 CAN 통신에 참여하기 위해서는 CAN 인터페이스가 필요합니다. 이는 CAN 컨트롤러와 CAN 트랜시버로 구성됩니다. CAN 프로토콜은 호스트를 상당히 완화하는데, CAN 컨트롤러는 이 CAN 프로토콜이 요구한 통신 기능을 수행합니다.
CAN 트랜시버
CAN 트랜시버는 CAN 컨트롤러를 물리 전송 매체에 연결합니다. 대체로 이 두 가지 구성 요소는 광학 또는 자기 분리 과정을 통해 전기적으로 분리되어 CAN 트랜시버가 CAN 버스의 과전압으로 인해 망가지더라도 CAN 컨트롤러와 그것의 호스트는 보존됩니다.
발송/수신
CAN 네트워크에서 CAN 노드는 수신하거나 송신하는 CAN 메시지의 숫자에 따라 차이를 보입니다. 수신 또는 송신 주파수에서도 큰 차이가 발생할 수 있는데, 한 예로 한 CAN 노드는 10 msec의 주기로 5개의 CAN 메시지를 수신하나, 다른 노드는 100 msec 주기로 하나의 CAN 메시지를 수신하기만 하면 됩니다. 이러한 명백한 차이를 바탕으로 두 개의 기본적인 CAN 컨트롤러 아키텍처가 만들어졌으며, 객체 저장소가 있는 CAN 컨트롤러(CAN controllers with object storage)와, 객체 저장소가 없는 CAN 컨트롤러(CAN controllers without object storage)가 바로 그것입니다.
통합
CAN 컨트롤러의 종류에 관계없이 CAN 컨트롤러는 통합될 수도, 또한 그림에 보이는 것과 같이 스탠드얼론 칩 컴포넌트(stand-alone chip component)로 이용될 수도 있습니다. 이 경우 마이크로컨트롤러는 메모리 칩처럼 CAN 컨트롤러를 다루게 됩니다. 스탠드얼론 칩 컴포넌트로 이용되는 경우는 더욱 유연성이 있으나 온 칩의 경우가 공간을 덜 필요로 하고 마이크로컨트롤러와 CAN 컨트롤러 사이의 통신이 더욱 빠르고 안전하다는 장점이 있습니다.