CAN 소개
CAN 버스 레벨
완료 조건
버스 연결
CAN 네트워크의 물리 신호 전송은 차동 신호 전송(differential signal transmission)에 기초합니다. 정확한 차동 전압값은 사용되는 버스 인터페이스에 따라 달라지며, 여기에서 고속 CAN 버스 인터페이스(ISO 11898-2)와 저속 버스 인터페이스(ISO 11898-3) 간 차이가 발생합니다.
전압레벨
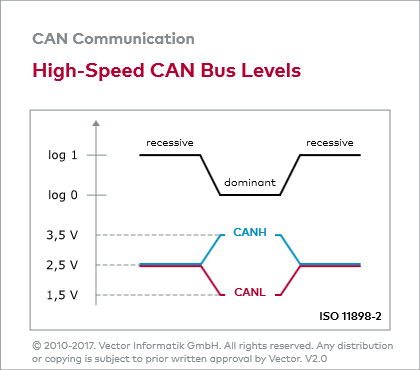
ISO 11898-2는 논리 값 “1”을 일반 차동 전압(typical differential voltage)인 0 볼트에 할당하며, 논리 값 “0”은 일반 차동 전압인 2볼트에 할당됩니다. 고속 CAN 트랜시버는 0.9볼트 이상의 차동 전압을 공통 모드 운영 범위(일반적으로 12볼트와 -12볼트 사이) 내의 우성 레벨로 해석합니다.
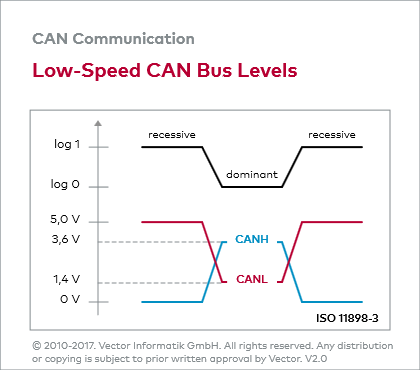
그러나 차동 전압이 0.5볼트 이하라면 이는 열성 레벨로 해석됩니다. 히스테리시스 회로(hysteresis circuit)는 여유도(immunity)를 방해 전압의 레벨까지 증가시킵니다. ISO 11898-3은 5볼트의 일반 차동 전압을 논리 값 “1”에, 2볼트 일반 차동 전압은 논리 값 “0”에 할당합니다.
그림 “고속 CAN 버스 레벨”과 그림 “저속 CAN 버스 레벨”은 CAN 버스의 차동 전압 관계를 보여줍니다.
마지막 수정됨: 목요일, 22 8월 2019, 8:13 AM