CAN 소개
리모트 프레임
완료 조건
요청 데이터
데이터를 전송하는 데에 이용되는 데이터 프레임 외에도, 모든 CAN 노드에 데이터를 요청하는 데에 이용되는 프레임인 리모트 프레임이 있습니다. 그러나 이 프레임은 차량에서는 거의 이용되지 않는데, 일반적으로 정보 생산자가 데이터 전송을 직접 개시하며 요청에 의해서는 이루어지지 않기 때문입니다. 표준 포맷 또는 확장 포맷으로 리모트 프레임을 전송할 수 있습니다.
RTR로 차단
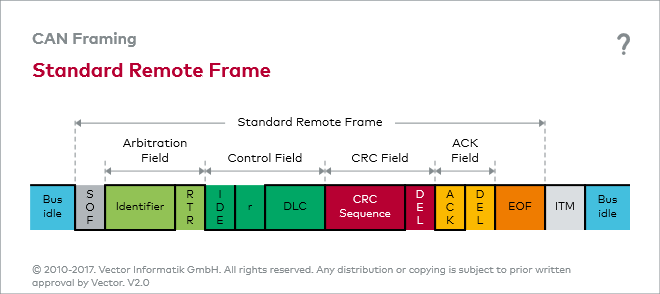
데이터 필드가 없다는 점을 제외하면 리모트 프레임의 구조는 데이터 프레임의 구조와 동일합니다. 데이터 프레임과 리모트 프레임의 차이점은 RTR 비트(원거리 전송 요청)에서 발생하는데, RTR 비트는 데이터 프레임의 경우 우성으로, 리모트 프레임의 경우에는 열성으로 전송됩니다.
2개의 프레임,
1개의 확인자
원칙적으로 리모트 프레임은 CAN 네트워크의 다른 모든 데이터 프레임에 의해 정의됩니다. 리모트 프레임의 확인자가 관련된 데이터 프레임의 확인자와 같은지 확인하기만 하면 됩니다. 해당 데이터 프레임 생성을 담당하는 ECU는 그것을 송신함으로써 리모트 프레임에 반응합니다.
리모트 프레임 및 응답
객체 저장소를 갖춘 CAN 컨트롤러(CAN controller with object storage)의 경우, 컨트롤러는 리모트 프레임에 자동으로 반응합니다. 객체 저장소가 없는 CAN 컨트롤러(CAN controller without object storage)는 호스트에게 리모트 프레임에 대해 알려서 호스트가 반응 과정을 시작할 수 있도록 해야 합니다.
이상적인 상황에서 리모트 프레임의 요청은 관련된 데이터 프레임의 즉각적인 반응으로 이어집니다. 그러나 그 요청과 반응 사이에 더 높은 우선순위의 CAN 메시지가 개입될 수 있습니다.
마지막 수정됨: 목요일, 22 8월 2019, 9:35 AM