CAN 소개
CAN 트랜시버
완료 조건
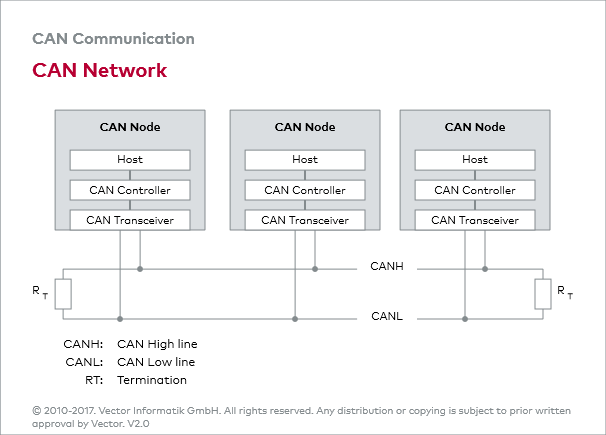
버스 연결
기존에 CAN 컨트롤러는 종종 별개의 회로를 통해 통신 매체(CAN 버스)에 연결이 되었습니다. 그러나 오늘날에는 CAN 트랜시버가 버스 연결을 처리합니다. CAN 트랜시버는 언제나 두 개의 버스 핀을 가지고 있는데, 하나는 CAN 하이 라인(CAN high line, CANH)이고 다른 하나는 CAN 로우 라인(CAN low line, CANL)입니다. 이는 CAN 네트워크의 물리 신호 전송(physical signal transmission)이 전자기적 호환성을 달성하는 데에 있어 대칭적이며, 네트워크의 물리 전송 매체가 두 개의 배선으로 구성되어 있기 때문입니다.
고속/저속
보통 고속 CAN 트랜시버(high-speed CAN transceiver)와 저속 CAN 트랜시버(low-speed CAN transceiver)는 구분됩니다. 고속 CAN 트랜시버는 1Mbit/s까지의 데이터 속도를 지원하는 반면, 저속 CAN 트랜시버는 125 kbit/s까지만 지원합니다. 그러나 저속 CAN 트랜시버에서는 버스 인터페이스의 고장을 방지하는 기능이 포함됩니다(예를 들어, 두 통신 라인 중 하나가 고장 나더라도 전체 통신은 유지됩니다).
트랜시버 레이아웃
그림 “CAN 트랜시버 레이아웃”은 고속 CAN 트랜시버의 기본 레이아웃을 보여줍니다. 두 개의 트랜지스터가 차단 중일 때, 두 CAN 선은 같은 잠재값(0.5 Vcc)를 가정하며 차동 전압은 0입니다. 레지스터가 모두 작동하게 되면 두 선 사이에 차동 전압이 발생하는데, 이는 부하 저항의 기능을 합니다. ISO 11898-2에 따르면 이 차이는 2볼트여야 하며, 이때 전류는 대략 35mA입니다.
잡음 여유도
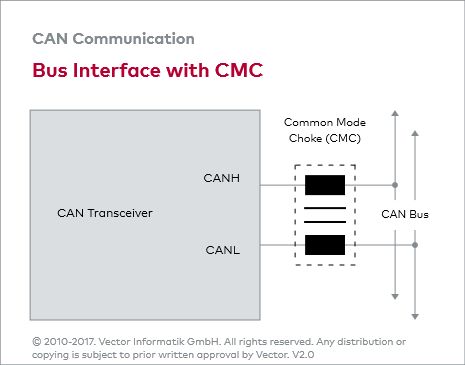
일반적으로 CAN 트랜시버는 전자기 발생이 매우 적고 높은 잡음 여유도(high noise immunity)를 위해 공통 모드 운영 범위가 높다는 특징이 있습니다. 더불어 오늘날의 CAN 트랜시버는 8kV까지 ESD를 보호합니다. 높은 공통 모드를 제거하는 것이 사용 구역에서 매우 중요하지만, 출력 부분 주위에 공통 모드 초크(common mode choke, CMC)를 삽입하여 전자기 발생을 더욱 감소시킬 수 있습니다.
제한
ISO 11898은 CAN 노드의 최대 숫자를 32개로 규정합니다. CAN 노드의 최대 숫자는 사용되는 CAN 트랜시버의 성능과 이것이 고속 CAN 네트워크에서 작동하는지 또는 저속 CAN 네트워크에서 작동하는지 여부에 따라 달라집니다. 한 예로, TJA1050 고속 CAN 트랜시버가 고속 CAN 네트워크에서 작동할 때에, 하나의 CAN 네트워크당 110개의 CAN 노드가 연결될 수 있습니다.
![]()
마지막 수정됨: 목요일, 22 8월 2019, 8:51 AM