- Überblick
- 1. Hinführung
- 2. CAN-Kommunikation
- 3. CAN-Framing
- 4. CAN-Buszugriff
- 5. CAN-Datensicherung
-
6. CAN FD
- Motivation für CAN FD
- Vorteile und Konsequenzen
- Neue Botschaftsformate
- Details der CAN FD Botschaft
- CAN oder CAN FD, die Unterscheidung
- Kompatibilität von CAN und CAN FD Controllern
- Beschleunigte Übertragung
- Selbstanzeige bei zu häufigen Fehlern
- Länge des Datenfelds
- Mehr Daten bei gleichbleibender Sicherheit
- Geändertes Bitstuffing und CRC-Berechnung
Einführung in CAN
Standardisierung
Abschlussbedingungen
CAN-Protokoll
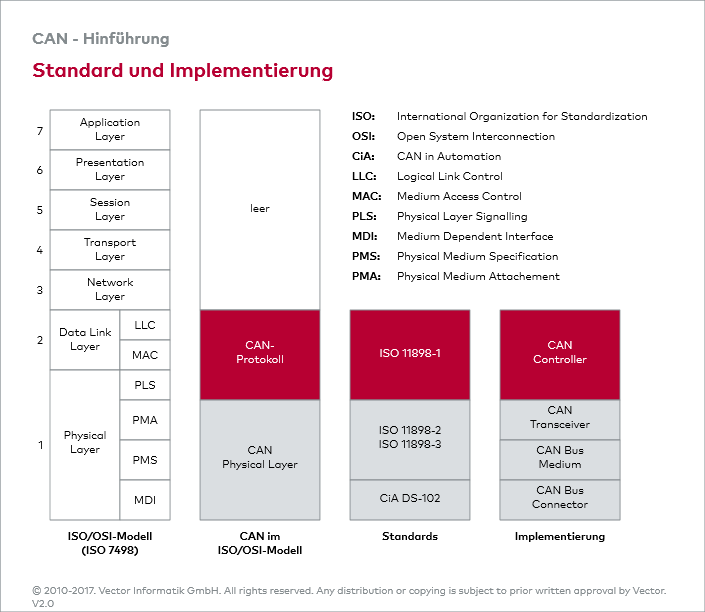
Die CAN-Technologie ist seit 1994 standardisiert und wird hauptsächlich durch drei ISO-Dokumente beschrieben. Die ISO 11898-1 beschreibt das CAN-Protokoll. Im Vergleich zum Referenzmodell der Datenkommunikation deckt das CAN-Protokoll lediglich das Data Link Layer (MAC - Medium Access Control, LLC - Logical Link Control) und das Physical Layer (PLS - Physical Signalling) ab.
CAN Controller
Implementiert wird das CAN-Protokoll in Hardware. Es stehen mittlerweile eine Vielzahl von CAN-Controllern zur Verfügung, die sich im Grunde nur im Umgang mit den CAN-Botschaften unterscheiden, was sich in Unterschieden im Object Layer manifestiert. Man unterscheidet CAN-Controller mit Objektespeicherung (sog. Full-CAN-Controller) von CAN-Controllern ohne Objektespeicherung (sog. Basic-CAN-Controller).
CAN-High-Speed und CAN-Low-Speed
Die beiden ISO-Dokumente ISO 11898-2 und ISO 11898-3 decken die beiden Unterschichten PMA (Physical Medium Attachment) und PMS (Physical Medium Specification) des Referenzmodells der Datenkommunikation ab. Sie beschreiben zwei unterschiedliche CAN Physical Layer: CAN-High-Speed Physical Layer und CAN-Low-Speed Physical Layer. Sie unterscheiden sich hauptsächlich in der Spannungsdefinition und der Datenübertragungsgeschwindigkeit (Datenrate).
Datenraten
Die ISO 11898-3 erlaubt Datenraten bis zu 125 KBit/s. Somit findet sie vor allem Anwendung im Komfortbereich des Automobils. Die ISO 11898-2 erlaubt Datenraten bis zu 1 MBit/s. Daher findet die ISO 11898-2 vor allem Anwendung im Antriebs- und Fahrwerksbereich des Automobils (hinsichtlich der Datenübertragung in einem CAN-High-Speed CAN-Netzwerk beschreibt die ISO 11898-5 das Verhalten eines CAN-Knotens im „Low Power Mode“).
Für die Unterschicht MDI (Medium Dependant Interface) des Physical Layers liegt kein Standard vor. Die CiA DS-102 (CiA: CAN in Automation) empfiehlt lediglich die Verwendung von ganz bestimmten Steckern (SUB-D9). Sie empfiehlt auch, eine ganz bestimmte Steckerbelegung einzuhalten.
Ereignisgesteuerte Kommunikation
Die ISO 11898-1 definiert eine ereignisgesteuerte Kommunikation. Bei hoher Buslast kann es zur Verzögerung vor allem niederpriorer CAN-Botschaften kommen. Zur Sicherstellung einer deterministischen Kommunikation in einem CAN-Netzwerk steht die ISO 11898-4 zur Verfügung. Bei der ISO 11898-4 handelt es sich um eine Erweiterung des Data Link Layers, und zwar um eine Time Triggered Communication-Option für CAN-basierende Netzwerke.
ISO/OSI-Referenzmodell
Die Grafik „Standard und Implementierung“ zeigt Ihnen den Zusammenhang zwischen dem ISO/OSI-Referenzmodell der Datenkommunikation, dem CAN-Standard und der Implementierung.
Zuletzt geändert: Mittwoch, 22. September 2021, 10:30