- Überblick
- 1. Hinführung
- 2. CAN-Kommunikation
- 3. CAN-Framing
- 4. CAN-Buszugriff
- 5. CAN-Datensicherung
-
6. CAN FD
- Motivation für CAN FD
- Vorteile und Konsequenzen
- Neue Botschaftsformate
- Details der CAN FD Botschaft
- CAN oder CAN FD, die Unterscheidung
- Kompatibilität von CAN und CAN FD Controllern
- Beschleunigte Übertragung
- Länge des Datenfelds
- Mehr Daten bei gleichbleibender Sicherheit
- Geändertes Bitstuffing und CRC-Berechnung
Einführung in CAN
Selbstanzeige bei zu häufigen Fehlern
Abschlussbedingungen
Error State Indicator
An das Bit Rate Switch (BRS) schließt sich ein Bit namens Error State Indicator (ESI) an. Es ist dominant wenn sich der sendende Netzknoten im Zustand Error Active befindet. Ist der ESI rezessiv, so befindet sich der Sender im Zustand Error Passive. 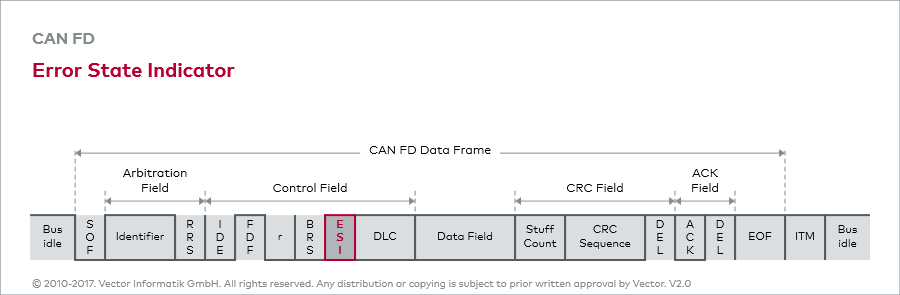
Der Sinn dieses Bits ist, eine transparentere Fehlerverfolgung sowie ein einfacheres Netzwerk Management zu ermöglichen. Die Zustände der Netzknoten, Error Active bzw. Error Passive, werden über den gesamten Bus hinweg signalisiert.
Zuletzt geändert: Mittwoch, 22. September 2021, 14:45